
In der Medizin der Zukunft sollen winzige Roboter selbstständig durch den menschlichen Körper navigieren. Sie sollen Medikamente transportieren, Messungen in Geweben vornehmen oder chirurgische Eingriffe durchführen. Um ihre Bewegung zu kontrollieren und medizinische Aufgaben zu erfüllen, ist es wichtig, ihre Position im Körper während der Operation erkennen zu können. Doch das war bislang eine Herausforderung für die Entwickler von biomedizinischen Implantaten und minimal-invasiven chirurgischen Instrumenten. Wissenschaftler vom Deutschen Krebsforschungszentrum (DKFZ) haben nun ein drahtloses Sensorverfahren auf Basis eines oszillierenden Magneten erfunden, das solche medizinischen Anwendungen deutlich verbessern kann.
Smarter Mikrokatheter für die minimal-invasive Chirurgie der Zukunft
Neue Sensoren: Echtzeit-Tracking im Gewebe ohne Strahlenbelastung
Zwar entwickelten Forschende bereits magnetisch angetriebene Mikro- oder Nanoroboter, die durch den Muskel, den Glaskörper des Auges oder das Blutgefäßsystem navigieren können. Doch mangelte es bisher an ausgereiften Systemen, mit denen die Aktivitäten der Roboter im Körpergewebe in Echtzeit verfolgt und kontrolliert werden können.
Herkömmliche bildgebende Verfahren sind dafür nur bedingt geeignet. Die Magnetresonanztomographie (MRT) etwa hat eine zu geringe zeitliche Auflösung, die Computertomographie (CT) ist mit Strahlenbelastung verbunden, und beim Ultraschall limitiert die starke Streuung der Schallwellen die räumliche Auflösung.
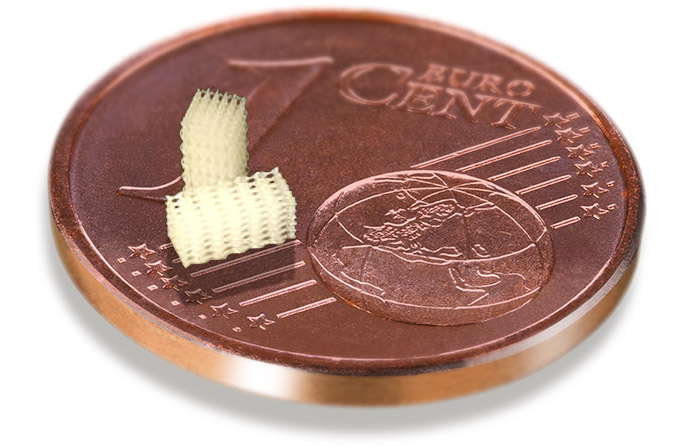
Mit einer neu entwickelten Methode beschreibt das Team um Tian Qiu vom Deutschen Krebsforschungszentrum (DKFZ), Standort Dresden, nun einen Lösungsansatz. Das winzige Gerät, das die Wissenschaftler entwickelt haben, basiert auf einem magnetischen Oszillator. Das ist ein mechanisch schwingender Magnet, der sich in einem millimetergroßen Gehäuse befindet. Ein äußeres Magnetfeld kann den Magneten mechanisch zur Schwingung anregen. Wenn die Schwingung abklingt, lässt sich dieses Signal mit Magnetsensoren erfassen.
Neurochirurgie: Augmented Reality für sichere Operation am Gehirn
Das Grundprinzip ist vergleichbar mit der Kernspinresonanz in der Magnetresonanztomographie (MRT). Die Forscher bezeichnen die Methode als „Small-Scale Magneto-Oscillatory Localization“ (SMOL).
Minimal-invasive Chirurgie: Tracking auf den Millimeter genau
Mit SMOL können die Forschenden die Position und Orientierung des kleinen Gerätes in großer Entfernung (über 10 cm), sehr genau – auf weniger als 1 mm – und in Echtzeit bestimmen. Im Gegensatz zu Tracking-Verfahren, die auf statischen Magneten basieren, kann SMOL Bewegungen in allen sechs Freiheitsgraden erfassen, also allen Raum- und Winkelkoordinaten – und das mit deutlich höherer Signalqualität.
Da das Gerät nur schwache Magnetfelder erzeugt und benötigt, ist es für den Körper unbedenklich. Zudem arbeitet es kabellos und ist mit vielen herkömmlichen Geräten und bildgebenden Verfahren kompatibel.
Neue Sensoren auch für Kapselendoskope geeignet
„Es gibt viele Anwendungsmöglichkeiten für die SMOL-Methode“, sagt Felix Fischer, Erstautor der Publikation. „Wir haben das System bereits in Miniaturroboter und Instrumente für die minimal-invasive Chirurgie integriert. Denkbar wäre eine Kombination mit Kapselendoskopen oder die Markierung von Tumoren für eine sehr präzise Therapie.“ Auch für vollautomatisierte Operationsroboter oder Augmented-Reality-Anwendungen könne die Methode einen entscheidenden Vorteil bringen.
Nicht nur in der minimal-invasiven Chirurgie: Tracking mit einfacher Ausstattung
SMOL benötigt nur eine vergleichsweise einfache technische Ausstattung. „Aufgrund seiner Abmessungen im Millimeterbereich lässt sich der Oszillator in viele bestehende medizinische Instrumente integrieren“, erklärt Tian Qiu, der Seniorautor der Publikation. Der Tracker ließe sich auch noch weiter miniaturisieren. „Unsere Technik hat dank ihrer präzisen räumlichen und zeitlichen Auflösung das Potenzial, viele interventionelle Verfahren in Zukunft deutlich voranzubringen“.
https://doi.org/10.1038/s44182–024–00008-x
www.dkfz.de






{kind=link}