Mit einer neuen, robotisch unterstützten Operationsmethode sollen Stabilisierungsschrauben in der Wirbelsäule sicher, genau und ohne Verletzungen des umliegenden Gewebes angebracht werden können. Forscher der Universität und des Inselspitals Bern sowie des Schweizer Zentrums für Elektronik und Mikrotechnologie entwickeln dazu gemeinsam mit Partnern aus der Industrie einen hochpräzisen, sensorgestützten Operationsroboter.
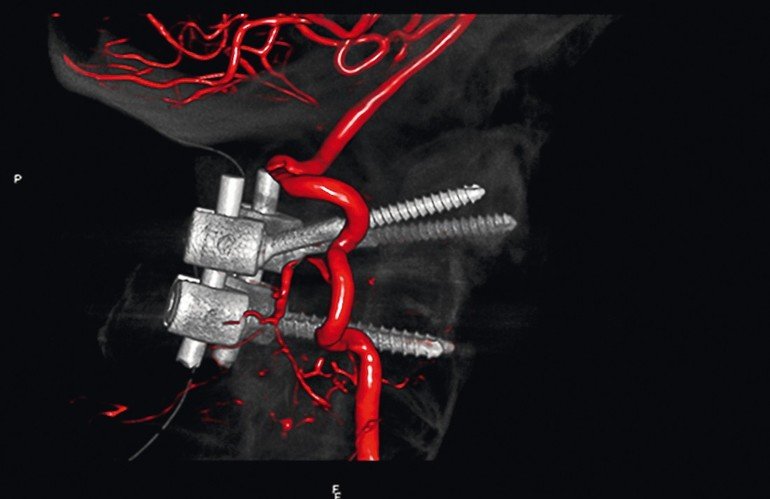
Die chirurgische Wirbelsäulenstabilisation ist eine der häufigsten Rückenoperationen. Dabei werden in mehrere Wirbelknochen so genannte Pedikelschrauben eingesetzt und später miteinander verbunden, um die Wirbelsäule wieder aufzurichten und zu stabilisieren. Rund 15 % der Schrauben werden jedoch nicht erfolgreich platziert, da die Wirbelsäule nicht einsehbar ist. Es besteht die Gefahr, dass das spitze Ende aus dem Knochen hervorragt und umliegende Nerven oder Gewebeteile verletzt.
Dies soll sich ändern. „Mit unserer Technologie können wir das Risiko einer Fehlplatzierung der Pedikelschraube auf nahezu Null senken“, sagt Andreas Raabe von der Universitätsklinik für Neurochirurgie am Inselspital. Die Grundlage bilden verschiedene patentierte Sensortechnologien. Sie sind hundertfach empfindlicher als die Hand eines Chirurgen und ermöglichen es, die Wirbelsäule während der Operation in Echtzeit mit Hilfe elektrischer und mechanischer Signale abzutasten und so die Lage des Bohrinstruments relativ zur Anatomie optimal einzustellen.
Der Roboter wird zum einen über die Elektromyographie (EMG) gesteuert, mit der in der Nähe liegende Nerven aufgespürt werden. Zum anderen wird die Knochendichte kontinuierlich gemessen, um die Position des Roboters exakt und reproduzierbar zu bestimmen. So können die Schrauben bei jeder Operation hochpräzise platziert werden. Das Projekt wird vom Förderungsangebot Bridge des Schweizerischen Nationalfonds und der Kommission für Technologie und Innovation unterstützt.






{kind=link}