

Flexible Greifhände und Leichtbauarme erlauben Robotern den Einsatz im direkten Umfeld des Menschen. Das gilt für Prüfprozeduren, Montage, Kanban-Prozesse, aber auch automatisierte Tätigkeiten im Haushalt. Und die Hand passt dabei auf.
Serviceroboter sollen nicht – wie Industrieroboter – in eingegrenzten Bereichen bleiben, sondern sich frei im Raum bewegen und den Menschen unterstützen. In der Regel sind sie dabei mobil, und die Komponenten müssen leicht sein, Platz sparen und möglichst wenig Energie verbrauchen. Auch an die Greifsysteme werden hohe Anforderungen gestellt: Gleichartige mechanische und elektrische Schnittstellen sollen in unterschiedlicher Anordnung so miteinander verbunden werden können, dass viele individuelle Arbeitsräume, Geometrien und Kinematiken möglich sind, ohne die Kosten in die Höhe zu treiben.
Zahlreiche Greifer und Komponenten aus dem Modulprogramm für mechatronische Greifsysteme der Schunk GmbH & Co. KG in Lauffen am Neckar erfüllen diesen Anspruch. Sie lassen sich in industriellen Anwendungen ebenso einsetzen wie in Mess- und Prüf-applikationen oder in Assistenzsystemen, die Menschen im Alltag unterstützen.
Ein Beispiel dafür ist die elektromotorisch angetriebene, modular aufgebaute Greifhand SDH-2. Sie verfügt über sieben unabhängige Freiheitsgrade und kann ohne Umrüstzeiten unterschiedlichste Objekte greifen und positionieren. Mit ihrer 24-V-DC Spannungsversorgung lässt sie sich in der Servicerobotik mobil einsetzen und vereint die Vorteile industrieller Robotergreifer mit denen der menschlichen Hand. Sie verfügt über drei identische, zweigliedrige Finger. Zwei dieser Finger lassen sich an ihrer Wurzel bewegungsgekoppelt um 90 Grad in entgegengesetzte Richtung drehen. Damit beherrscht die Greifhand unter anderem die industriellen Greifarten „Dreifinger zentrisch“, „Zweifinger parallel“ und „Zylindergriff“. Darüber hinaus sind weitere Variationen möglich. Die Gelenkmodule können Drehmomente von bis zu 2,1 Nm für das proximale und 1,4 Nm für das distale Gelenkmodul erzeugen. Das entspricht nahezu den Werten der menschlichen Hand.
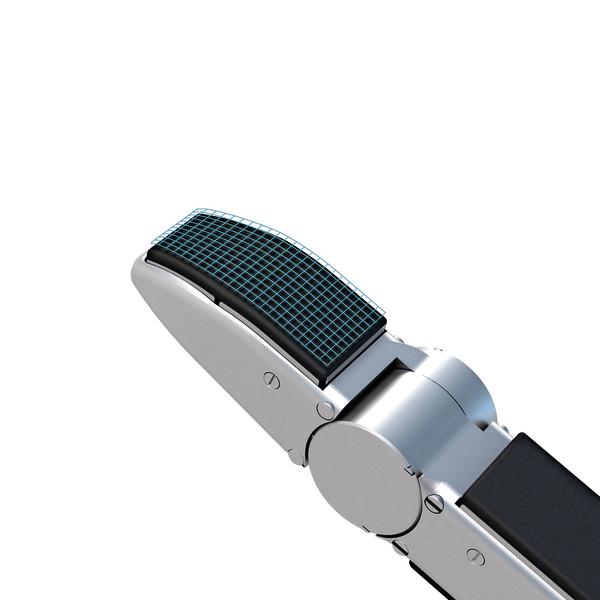
Die Dreifingerhand ist auch in der Lage, Objekte zu identifizieren und ähnliche Teile sicher und feinfühlig zu handhaben. Um das zu erreichen, erfassen sechs taktile Sensorfelder ortsaufgelöst die Kontaktkräfte, die an den Greifflächen entstehen. Damit kann die Hand reaktiv greifen, denn die Sensoren erkennen, ob ein Objekt optimal gehalten wird oder ob der Griff korrigiert werden muss. Zudem ist sie in der Lage, unterschiedlichste Objekte zu positionieren und anschließend beispielsweise zu fügen. Die Intelligenz des Greifmoduls steckt in der „Handwurzel“: Die für die Greifszenarien erforderliche Steuerungsstrategie kann als dezentrales Programmmodul in den Speicher der Handelektronik geladen werden.
Um dem Einsatz in der Nähe des Menschen gerecht zu werden, hat die Hand weder Ecken noch scharfe Kanten. Greifgeschwindigkeit und -kraft lassen sich so programmieren, dass vom Greifen keine Gefahren ausgehen. Stößt dennoch einmal ein Finger an ein Hindernis, erkennen die Antriebe in der Hand innerhalb von Millisekunden eine steigende Leistungsaufnahme, und die Hand reagiert, indem die Bewegung gestoppt und gegebenenfalls umgekehrt wird.
Da die Fügestellen und Gelenke statisch beziehungsweise dynamisch gedichtet und so vor Staub und Feuchtigkeit geschützt sind, können Regen, Nebel oder leichte Verschmutzungen dem Modul nichts anhaben. Spezielle Drehdurchführungen innerhalb der gedichteten Finger ermöglichen das Durchleiten von Energie und Signalen, so dass auf außen liegende und damit besonders störanfällige Kabel verzichtet werden kann.
Für schlüssige Greifkonzepte in der Servicerobotik müssen aber auch die übergeordneten Systeme, wie etwa die Greifarme, besondere Anforderungen erfüllen. Ein kompakter Helfer für stationäre und mobile Anwendungen ist der Leichtbau-Arm LWA 4P. Bei einem Eigengewicht von 12 kg kann er Lasten bis 6 kg dynamisch handhaben. Da die Entwickler alle Elemente nach den Prinzipien des Leichtbaus gestaltet haben und der Arm mit Torquemotoren der neuesten Generation ausgerüstet ist, verbraucht der LWA 4P durchschnittlich 80 W. Die seit rund einem Jahr standardisierten ERB-Powerball-Module vereinen die Bewegung zweier Achsen und ermöglichen besonders geschickte Manipulationen auf engem Raum.
Die Steuer- und Regelelektronik ist in die Gelenkantriebe integriert. Position, Geschwindigkeit und Drehmoment lassen sich flexibel regeln. Die Versorgungsleitungen für Greifer und Tools verlaufen im Inneren, so dass störende und fehleranfällige Kabel an der Peripherie entfallen. In bestehende Steuerungskonzepte lässt sich der Arm einfach einbinden, da er über integrierte Intelligenz, universelle Kommunikationsschnittstellen und Kabeltechnik für Datenübertragung und Spannungsversorgung verfügt. Eine vollständige CoDeSys-SPS in der Steuerung ermöglicht komplexe Operationen auch ohne Anlagenanbindung. Sie kann bei Bedarf die komplette Peripherie steuern.
Über ein Handbediengerät mit Touch-Display lässt sich der Leichtbauarm einfach teachen oder instruieren. Mit seiner 24-V-DC-Versorgung ist er für Einsätze an wechselnden Standorten ausgestattet. So gibt es bereits Versuche, in denen der Arm steril verpackt als Operationsassistent eingesetzt wird. Aufgrund seines geringen Gewichts kann er leicht platziert und in Notfallsituationen schnell beiseite gestellt werden.
Die Verbindungselemente zwischen den Gelenkmodulen sind so geformt und zueinander positioniert, dass riskante Quetsch- und Scherbewegungen auch dann ausgeschlossen sind, wenn eine menschliche Hand zwischen die bewegten Module greift. Darüber hinaus kann die Steuerung mit einer speziellen Leistungsbegrenzung ausgestattet werden. Diese setzt über den gesamten Greifprozess ein Höchstmaß für die Leistungsaufnahme fest. Werden je nach Anwendung und Gefährdungsanalyse wenige einfache und kostengünstige Schutzeinrichtungen ergänzt, können sich Mensch und Leichtbauarm den Arbeitsraum teilen. Der Powerball-Arm eignet sich für unterschiedlichste Anwendungen, beispielsweise in der Laborautomation, in Assistenzsystemen oder in Prüfapplikationen.
- Dr. Roko Tschakarow Schunk, Lauffen am Neckar
- Weitere Informationen Über den Anbieter von Automatisierungskomponenten: www.schunk.com
- Greifer wie menschliche Hand
- Sensoren in Greifflächen
- Korrektur der Greifkraft
- Leichtbauroboter
- Reduziertes Risiko für Menschen im Umfeld
Ihr Stichwort
Unsere Webinar-Empfehlung

Armprothesen und andere medizinische Hilfen mit dem 3D-Drucker individuell, schnell und kosteneffizient herstellen
Teilen:





{kind=link}