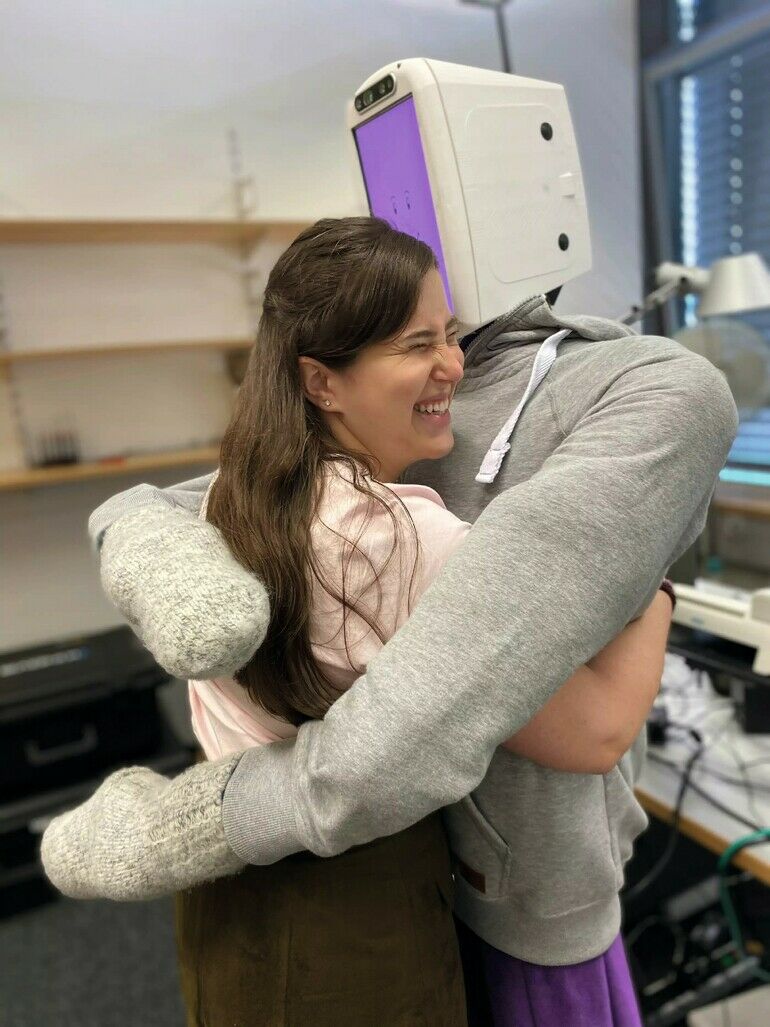
Warm, geborgen sicher. So sollte man sich in einer Umarmung fühlen. Und so fühlt es sich auch an, wenn sich die kräftigen Arme von Huggiebot schließen und man an seine warme, breite Brust gedrückt wird. Der Vorzeige-Roboter der Abteilung Haptische Intelligenz des Max-Planck-Instituts für Intelligente Systeme in Stuttgart umarmt sein menschliches Gegenüber routiniert. Doch bis Huggiebot ein guter Partner für Umarmungen wurde, war es ein weiter Weg für Katherine J. Kuchenbecker und ihr Team. Denn Maschinen das Fühlen beizubringen, also den Tastsinn in Technik zu übersetzen, ist anspruchsvoll und das Forschungsfeld noch jung. Ziel von Kuchenbecker ist es, haptische Interaktionen zu verstehen und dadurch das Zusammenspiel zwischen Menschen, Maschinen und physischen Objekten zu verbessern. Mit haptischen Interaktionen sind dabei Kontakte mit Robotern gemeint, bei denen es um die tastende Wahrnehmung geht. „Letztlich will ich interaktive Robotersysteme erschaffen, die Menschen wirklich helfen können.“, sagt Kuchenbecker. Ihr Augenmerk liegt dabei besonders auf haptischen Anwendungen für Roboter, die bedürftige Menschen bei einer Therapie oder im Alltag unterstützen.
Auf dem Weg zum haptisch intelligenten Roboter
Für die Forschenden ist Huggiebot bestens geeignet, solche tastenden Mensch-Roboter-Interaktionen zu studieren. Denn am Beispiel der Umarmung können sie erproben, welche Bedingungen ein Roboter erfüllen muss, damit Menschen mit ihm gerne körperlich interagieren. Während sich Pflegeroboter oftmals komplexere und intimere Berührungen ausführen müssten, sind die Umarmungen von Huggiebot relativ einfach und unverfänglich. Trotzdem verlangen sie viel Gefühl. Da Umarmungen für die meisten Menschen angenehm sind, ist es zudem leicht, Studienteilnehmer zu gewinnen, die den Roboter testen.
Ziel von Alexis E. Block, der leitenden Wissenschaftlerin des Projekts, und Kuchenbecker ist es, dass Huggiebots Umarmungen genauso beruhigen, trösten und Geborgenheit geben wie die Umarmung eines Menschen. Haptisch intelligente Roboter könnten in Zukunft dann auch die Lücke schließen, die zwischen virtueller und physischer Welt klafft. Denn im virtuellen Raum findet ein zunehmender Teil sozialer Begegnungen statt. Roboter mit Tastsinn könnten es Menschen, die eigentlich weit voneinander entfernt sind, erlauben, Berührungen auszutauschen.
Huggiebot 2.0: Kamera erkennt Abstand und Größe der Personen
Um Huggiebot zu entwickeln, untersuchten Kuchenbecker und Block zunächst, welche physischen Eigenschaften ein Roboter mitbringen sollte, damit Menschen seine Umarmungen als natürlich und angenehm empfinden: Sie fanden heraus, dass er weich, warm und ungefähr so groß wie ein Mensch sein sollte. Außerdem sollte er Menschen, die mit ihm interagieren, visuell wahrnehmen und seine Umarmung an die Größe und Körperhaltung der Person anpassen. Schließlich muss der Roboter erkennen, wann er die Umarmung beenden soll.
Inzwischen haben die Forschenden verschiedene Versionen von Huggiebot entwickelt. Huggiebot 2.0 etwa konstruierten sie völlig neu, nachdem sie zunächst mit einem leicht abgewandelten und umprogrammierten kommerziellen Roboter gearbeitet hatten. Huggiebot 2.0 besteht aus einem zentralen Gestell, einem Oberkörper, der wie ein Wasserball aufgeblasen wird, zwei Industrieroboterarmen und einem Bildschirm als Kopf und ist in ein graues Sweatshirt sowie einen langen lila Rock gekleidet. Erkennt er mithilfe der Kamera, die sich oberhalb des Bildschirms befindet, eine Person in seinem Umfeld, fragt er: „Kannst du mich bitte umarmen?“ Auf dem Bildschirm erscheint dabei ein freundliches Gesicht. Falls sich die Person daraufhin annähert, stellt sich Huggiebot auf eine Umarmung ein und taxiert die Größe der Person. Sobald die Person in Reichweite der Arme ist, schließt er die Arme und drückt die Person an seine Brust. Diese fühlt sich weich und warm an, weil sie luftgepolstert und beheizt ist.
Sensoren sorgen für den richtigen Umarmungsdruck
Sensoren und eine Steuerung der Arme sorgen dafür, dass der Druck, mit dem Huggiebot die Person in seine Arme schließt, einer herzlichen Umarmung entspricht. Erwidert die Person die Umarmung, nimmt Huggiebot dies durch einen Drucksensor wahr, der im hinteren Teil seines luftgefüllten Oberkörpers liegt. Wenn die Person den Druck löst oder sich leicht gegen die Arme von Huggiebot lehnt, um die Umarmung zu beenden, öffnet der Roboter seine Arme. So kommt es nicht zum unangenehmen Gefühl einer ungewollt langen Umarmung, und die Interaktion mit dem Roboter wird als sicher empfunden.
Roboterhersteller sollten offener sein für Anwendungen in der Klinik
Wie gut die haptischen Elemente und die Steuerung von Huggiebot arbeiten, zeigte sich in Studien mit Probanden. In einer Untersuchung tauschten die Teilnehmer jeweils acht Umarmungen mit dem Roboter aus, bei denen die Forschenden unterschiedliche Funktionen an- oder ausschalteten. Die Ergebnisse der anschließenden Befragungen zeigten klar, dass die haptische Wahrnehmung eine große Rolle spielt: Wenn der Roboter sich an ihre Größe anpasst und die Umarmung reaktiv beendet, empfanden die Probanden das als angenehmer und bewerteten die Interaktion positiver.
Weitere Informationen:
Max Planck Institute for Intelligent Systems
Heisenbergstr. 3
70569 Stuttgart
www.is.mpg.de






{kind=link}