

Ein Roboter, der Menschen operiert? Was nach Science-Fiction klingt, könnte Ärzten und Ärztinnen zukünftig die Arbeit im OP erleichtern. Im Forschungsverbund Fornero – Nahtlose und ergonomische Integration der Robotik in den klinischen Arbeitsablauf – entwickeln Forschende Methoden, um assistierende Roboter für die Chirurgie durch intuitive Schnittstellen im Operationssaal zu integrieren. Sie wollen die Software sinnvoll mit dem Menschen zusammenzubringen. So können Operationen sicherer und zugleich effektiver werden.
An dem Projekt sind neben der der Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU) fünf weitere Forschungseinrichtungen sowie fünf Unternehmenbeteiligt. Wegen seines innovativen Forschungsansatzes wird das Projekt mit rund 2 Millionen Euro vom Stiftungsrat der Bayerischen Forschungsstiftung gefördert.
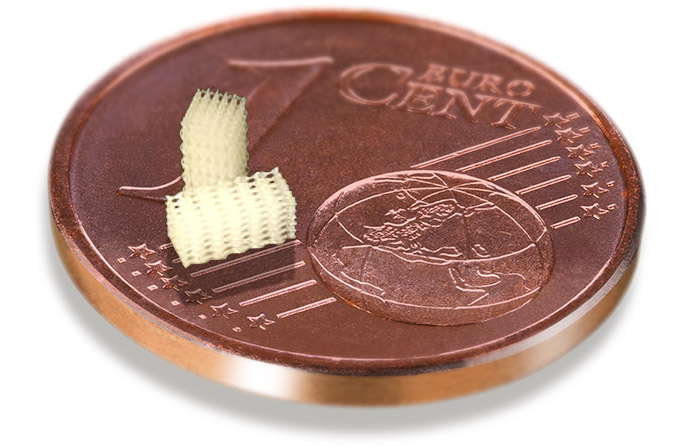
Mikro-Robotik für die OP am Auge
Assistenz-Roboter werden in der Augenchirurgie bereits vereinzelt angewendet. Bei Operationen im hinteren Augenabschnitt müssen Chirurginnen und Chirurgen mit einem Instrument sehr nah an der empfindlichen Netzhaut arbeiten. „Netzhautchirurgie ist sehr feinmechanisch und braucht hohe Präzision und gleichzeitig extrem geringe Kräfte“, erklärt Prof. Franziska Mathis-Ullrich, die ein Teilprojekt von Forneto leitet. „Das sind Kräfte, die unter dem Wahrnehmungslevel eines Menschen liegen.“
Arbeiten Chirurgen mit bereits existierenden Systemen, können diese die Präzision der menschlich durchgeführten Bewegung erhöhen. Bisher beinhalten sie allerdings keine autonome Arbeitsweise.
Mikrochirurgie: Was OP-Roboter und robotisches Mikroskop leisten
Roboter, die zum Teil autonom arbeiten, können einen noch größeren Mehrwert für die Augenchirurgen bieten. Das Forschungsprojekt soll Teilschritte von Augenoperationen so automatisieren, dass die Assistenzsysteme die Chirurgen entlasten und besonders schwierige Schritte erleichtern.
Im Teilprojekt Mikro-Robotik will Mathis-Ullrich in Zusammenarbeit mit dem Forschungsverbund deshalb herausfinden, wie solche teilautonomen Schritte überhaupt aussehen könnten. Ein weiterer Aspekt ist die Frage, wie die Zusammenarbeit zwischen Mensch und Maschine intuitiv und effizient funktioniert.
OP-Robotersysteme noch nicht ausreichend integriert
Bislang sind Robotersysteme, selbst wenn sie bereits im OP-Saal eingesetzt werden, nicht optimal an die Abläufe und Bedingungen angepasst. Auch das soll der Forschungsverbund Fornero verbessern. Bei Operationen am Auge müssen Chirurgen auf engstem Raum zusammenarbeiten, denn der Arbeitsbereich am Auge ist sehr klein. Deshalb müssen ergonomische Anforderungen, wie beispielsweise die Interaktion zwischen Mensch und Roboter berücksichtigt werden.
Darüber hinaus nutzen die Forschenden Simulationen, Augmented-Reality-Anwendungen und User-Interface-Technologien, um einen möglichst effizienten Arbeitsbereich für die Zusammenarbeit von OP-Personal und Robotersystemen zu schaffen. „Das Personal muss den Roboter am Auge des Patienten effizient positionieren. Das bedeutet, wir müssen simulieren, wie die OP abläuft und welche Einflüsse dies auf die Roboter-Assistenz hat“, beschreibt Mathis-Ullrich. „Um das Robotersystem zu integrieren, müssen außerdem Interaktionen analysiert werden.“ Dazu gehört beispielsweise, wie das System mit Patienten, dem OP-Personal oder weiteren Systemen interagieren würde.
Über den Forschungsverbund Fornero
Im Rahmen der Hightech Agenda Bayern wollen Forschende die Herausforderungen der Robotik und Medizintechnik untersuchen.
Kontakt zu den Partnern
Prof. Franziska Mathis-Ullrich
Surgical Planning and Robotic Cognition (Sparc)
E-Mail: franziska.mathis-ullrich@fau.de





{kind=link}