
Bereits heute setzen Ärzte Roboter bei Operationen ein. Nun wollen Forschende derartige Systeme auch aus der Ferne beziehungsweise mobil bedienbar machen. Projektleiter Marc Ruffing umreißt die damit verbundenen Herausforderungen: „Bisher muss die operierende Person in der Nähe des Operationssaals anwesend sein, da eine mobile Nutzung von ferngesteuerter Robotik aufgrund der Größe und Infrastruktur solcher Systeme noch nicht praktikabel ist. Zudem ist die Steuerung der Systeme nicht intuitiv.“ Die operierende Person arbeite mit Joysticks über einem abgeschirmten Bildschirm. Es fehle sowohl die natürliche Bewegung als auch das haptische Feedback. „Im Gegensatz zum Menschen sind Roboter nicht feinfühlig genug.“
Diese Hürden zu überwinden, haben sich Marc Ruffing und sein Team zur Forschungsaufgabe gemacht. Ruffing forscht am Lehrstuhl für Funkkommunikation und Navigation an der Rheinland-Pfälzische Technische Universität Kaiserslautern-Landau (RPTU) und im Forschungsbereich Intelligente Netze am Deutschen Forschungszentrum für Künstliche Intelligenz GmbH (DFKI).
Roboter reagieren in Echtzeit
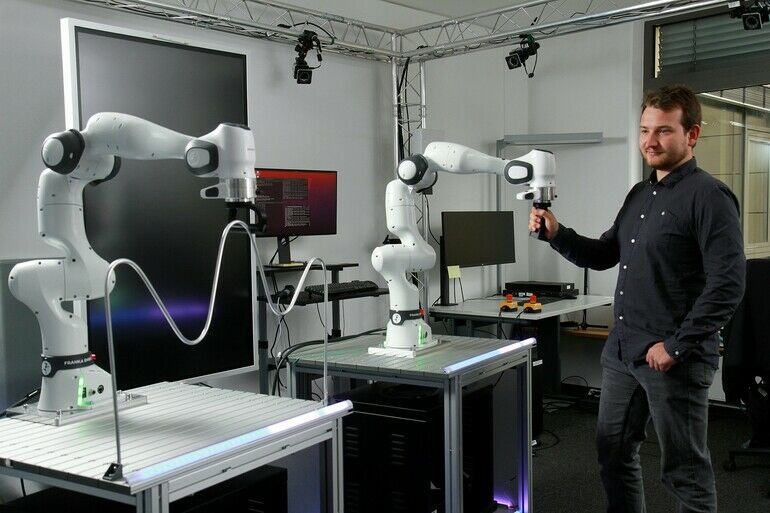
Die Forscher nutzen für ihre Arbeiten einen Demonstrator, der aus zwei kollaborativen Roboterarmen besteht und somit ein klassisches Setup bietet. Ein Roboterarm lässt sich durch die Führung des anderen von Menschenhand steuern. Das System ermöglicht ein virtuelles haptisches Feedback in Form von Forcefeedback. Dieses wird vom gesteuerten Roboterarm an den steuernden Roboterarm übertragen. Dadurch kann die steuernde Person spüren, was sie gerade tut.
Die Kommunikation zwischen den beiden Robotern erfolgt über ein Netzwerk. Dabei sind keine großen Datenpakete unterwegs – der Knackpunkt ist vielmehr ein anderer: „Gerade bei derartig hochsensiblen Tätigkeiten wie ferngesteuerten Operationen gelten besonders hohe Anforderungen an Latenzzeiten“, erklärt Teamleiter Christoph Lipps. Steuerbefehle der operierenden Person müssten ohne jegliche Verzögerung am Behandlungsort ankommen. „Deswegen schreiben wir anhand des Testszenarios fest, was der künftige Mobilfunkstandard 6G in puncto Echtzeit-Steuerung erfüllen muss.“
Roboter warnt bei Müdigkeit
Parallel forscht das Team daran, wie sich mithilfe von intelligenten Technologien die Bedienung des Systems verbessern lässt. Ebenso ist es möglich, eine Mensch-Maschine-Schnittstelle (Brain-Computer-Interface, BCI) in das System einzubinden. „Indem wir mittels Elektroenzephalografie oder Nahinfrarot-Spektroskopie die Hirnströme einer Person messen, können wir Daten gewinnen, die über den Gemütszustand Auskunft geben“, sagt Matthias Rüb, wissenschaftlicher Mitarbeiter im Team. Nimmt die Aufmerksamkeit des Arztes ab oder sein Stresslevel zu, könnte beispielsweise eine Warnmeldung erfolgen.
Mit den Erkenntnissen aus dem Projekt wird das Team das Pflichtenheft für die Echtzeit-Fernsteuerung von Operationsrobotern befüllen.
Aber: „Wir entwickeln keine Medizinprodukte“, fasst Ruffing zusammen. „Vielmehr geht es uns darum, Anforderungen an 6G und an KI zu definieren, um die Technik in die Anwendung zu bringen – etwa in Form eines mobilen Operationssaals oder eingebaut in einen Krankenwagen.“
KI in der Medizin: Verteilte Künstliche Intelligenz für den OP
KMUs und Start-ups mit einbeziehen
Angesiedelt ist das Projekt unter dem Dach des „Open 6G Hub“, das von Prof. Hans D. Schotten koordiniert wird. Er ist Leiter des Lehrstuhls Funkkommunikation und Navigation an der RPTU und Leiter des Forschungsbereichs Intelligente Netze am DFKI.
Neben der RPTU und dem DFKI sind weitere Hochschulen und Forschungsinstitute beteiligt. Es sollen noch Open-Labs und offene Experimentalfelder installiert werden. Nicht zuletzt wollen die Initiatoren durch das Einbezieheb von KMU und Start-Ups und deren Ergebnissen ein offenes Innovationssystem fördern.
Die Forschenden präsentieren anhand eines Demonstrators ihre Arbeit, auf der Medizintechnikmesse Medica in Düsseldorf, vom 13. bis 16. November am Forschungsstand Rheinland-Pfalz (Halle 3, E80).
Kontakt:
RPTU
Klaus Dosch
Ansprechpartner für Unternehmen
E-Mail: klaus.dosch@rptu.de
Telefon: +49 (0)631 205 3001
Marc Ruffing
Lehrstuhl für Funkkommunikation und Navigation
Tel: +49 (0)631 205 75 1826
E-Mail: marc.ruffing@rptu.de






{kind=link}