


Firmen im Artikel
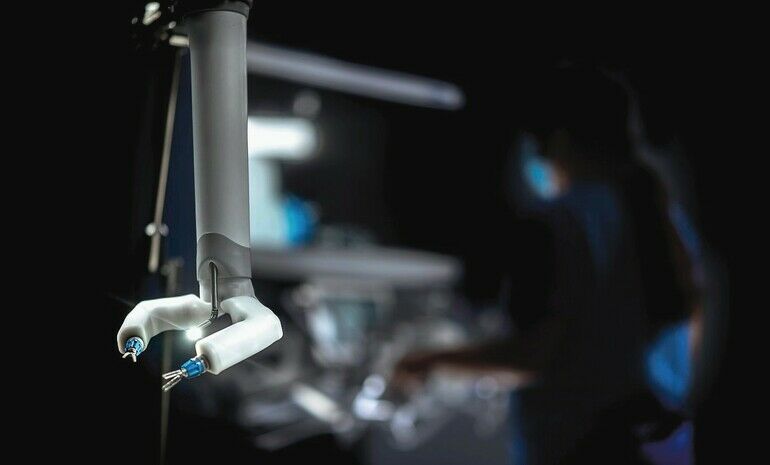
Eingriffe mittels kleiner Einschnitte vorzunehmen, ist das Ziel der roboterassistierten Chirurgie (RAC). Dafür müssen Mediziner Roboterarme und Kameras präzise steuern können. Ein Hersteller solcher Systeme ist das US-amerikanische Unternehmen Virtual Incision aus Lincoln in Nebraska. Jüngst hat es seine weltweit erste miniaturisierte RAC-Plattform vorgestellt. Diese lässt sich in klinische Abläufe integrieren, ohne bestehende Infrastruktur zu beeinträchtigen.
Das System mit Namen Mira ist mit seinem Gewicht von knapp 1 kg leicht zu transportieren und im Operationssaal aufzustellen. Es besteht aus einer OP-Konsole, über die sich die Instrumentenarme kontrollieren lassen und die die endoskopische Sicht auf die Anatomie in Echtzeit ermöglicht. Der zugehörige Wagen transportiert die Ausrüstung an den Einsatzort.

(Bild: Virtual Incision)
Die geringe Größe in Kombination mit der Mobilität sollte Mira von den bisher typischen Ausleger- oder Sockelsystemen unterscheiden. Diese benötigen eine große Stellfläche und können daher nur in OP-Sälen mit einer gewissen Größe eingesetzt werden, ohne die Sicht und Bewegungsfreiheit des Hilfspersonals zu beeinträchtigen. Mit dem kleinen Mira-System sollen die 90 % der Operationssäle, die derzeit noch keinen Zugang zu einem RAC-System haben, mit solchen Unterstützungssystemen ausgestattet werden können.
Als größte technische Herausforderung bei der Konstruktion des mobilen Mira-Systems erwies sich die Aufgabe, ein Gerät zu schaffen, dass nicht nur klein, tragbar und einfach zu bedienen ist, sondern auch stark genug, um anspruchsvolle Operationen durchzuführen – wie beispielsweise Darmresektionen.
Starre Arme liefern die erforderliche Kraft für Dickdarm-OPs
Die erforderliche Kraft, um auch schwere und große Organe wie den Dickdarm zu manipulieren, liefern im Mira-System die starren (nicht schlangenartig beweglichen) Arme mit innen angeordneten Motoren. Damit kann Mira auch komplexe Multi-Quadranten-Verfahren, wie die Mobilisierung des Dickdarms im Abdomen während der Kolonresektion, bei vielen verschiedenen Patiententypen durchführen.
Die bisher für die Roboter-assistierte Chirurgie üblichen Ausleger- oder Sockelsysteme mit mehreren Zugängen zum Bauchraum, den Ports, erfordern dafür eine umsichtige Anordnung der Zugänge. Es braucht eine sorgfältig geplante Choreografie der Abläufe, damit die Roboterarme außerhalb des Patienten nicht kollidieren. Das miniaturisierte, in sich geschlossene Design des Mira-Systems hingegen ermöglicht uneingeschränkten Zugang, ohne die Gefahr von Kollisionen der Roboter-Arme außerhalb des Patienten.
Avatera: OP-Roboter aus Jena als Alternative zum Davinci-System
Schon während der Konzeption des Mira-Systems entschied sich Virtual Incision, mit der US-Niederlassung des Schweizer Antriebsherstellers Maxon zusammenzuarbeiten. Den Ausschlag dafür gaben sowohl dessen umfassendes Motorensortiment als auch das Expertenwissen von internationalem Ruf. So sollte Maxon den Medizingerätehersteller bei dessen „Make-and-Improve-Designprozess“ unterstützen. Soll heißen: Die Entwickler erstellten immer wieder einen Entwurf und veränderten diesen, um das System zu verbessern.
Das Team von Virtual Incision konnte so schließlich den Wirkungsgrad seines Systems steigern und die zu liefernde Abgabeleistung für jedes Gelenk maximieren. Aufgrund dieses Konstruktionsmerkmals bietet Mira, gemessen an der Größe des Systems, eine hohe Kraft. Es kann an jeder beliebigen Position im Arbeitsraum eine Abgabekraft von bis zu rund 8,9 N aufbringen und sich dennoch schnell und wendig bewegen. Das ist notwendig, denn ein RAC-System muss die Bewegungen des Chirurgen in Echtzeit imitieren können, damit dieser bei Bedarf schnell reagieren kann.
Erfolgreicher Einsatz von Mira bei Darmresektionen
Seine Leistungsfähigkeit bewiesen hat das System beispielsweise bei Darmresektionen, für die es im Rahmen einer klinischen Studie (investigational device exemption, IDE) erfolgreich eingesetzt wurde. Dies war auch das erste Mal, dass die Motoren eines RAC-Geräts im menschlichen Körper selbst im Einsatz waren. Die Ergebnisse sollten die Marktzulassung durch die FDA unterstützen.
Eine weitere Eigenschaft des Mira-Systems ist, dass das Gerät so konstruiert wurde, dass es zwischen den Einsätzen leicht zu reinigen und zu sterilisieren ist. Dazu tragen die sterilisierbaren Maxon-Antriebe vom Typ ECX Speed 6 und 8 mm bei. Der Vorteil: Ein System, das gut zu reinigen ist, muss nicht für jede Operation aufwendig abgedeckt werden. Für die meisten derzeit angebotenen Systeme ist das erforderlich – was bedeutet, dass ein OP-Saal zwischen den Eingriffen längere Zeit für diese Maßnahmen belegt ist.
(Bild: Maxon Group)
Das Mira-System wurde Anfang 2024 in den USA für den kommerziellen Einsatz bei kolorektalen Eingriffen zugelassen. Derzeit ist der OP-Roboter in der Schweiz in einer klinischen Studie zur Bewertung des Geräts bei gutartigen Hysterektomien im Einsatz. Die dabei gewonnenen Daten sollen für internationale Zulassungsanträge verwendet werden.
Maxon und Fourier arbeiten künftig bei Exoskeletten und Robotiksystemen zusammen
Die Kraft, die das System trotz seiner geringen Größe bietet, macht Mira auch für den Einsatz im Weltraum interessant: Auf der Internationalen Raumstation ISS wurde eine Ausführung von Mira 2024 bereits getestet. Dabei steuerten Chirurgen auf der Erde das Gerät mittels einer Konsole und simulierten chirurgische Tätigkeiten, wie das Schneiden von simuliertem Gewebe und die Manipulation kleiner Objekte.
Weitere Informationen
Auf der Compamed 2024 wird das Mira-System am Stand von Maxon zu sehen sein.
Auf der Messe: Halle 8a, Stand G16






{kind=link}