
Firmen im Artikel
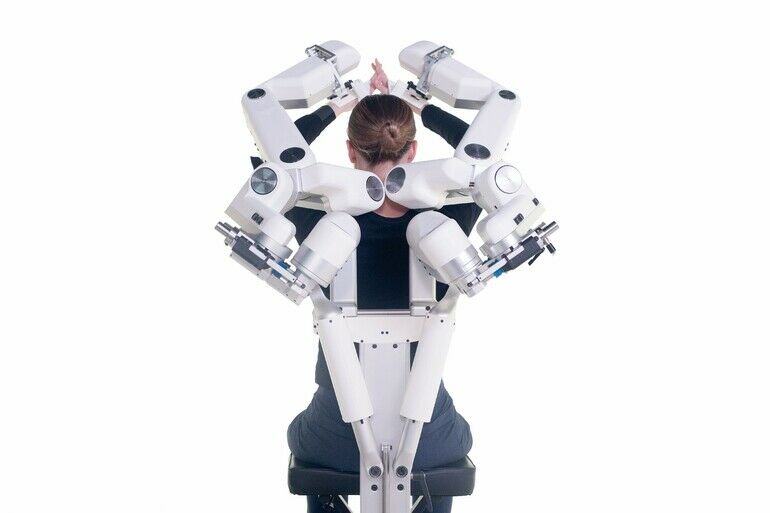
Vertraue mir. Das könnte ein Roboter einem Patienten signalisieren, der sich in seine „Arme“ begibt. Doch es ist in erster Linie der Ingenieur, der den Roboter so gestalten muss, dass dieser das Vertrauen auch verdient. Vor dieser Aufgabe standen die Entwickler des US-amerikanischen Anbieters Harmonic Bionics, als sie ein Exoskelett entwarfen. Dieses sollte speziell für die Therapie der oberen Extremitäten geeignet sein.
So entstand das Exoskelett Harmony SHR, um Patienten sowie deren Pflegekräfte zu unterstützen. Es ist mit einer intelligenten Technologie ausgestattet, die ein datengestütztes Behandlungsprotokoll für neurologische und motorische Bewegungsstörungen ermöglicht.
Kraftempfindliche Robotearme fürs Exoskelett
Doch marktübliche Roboterarme sind in der Regel nicht auf den sicheren Umgang mit Menschen ausgerichtet und damit nicht für Anwendungen in der Physiotherapie geeignet. Für sein Exoskelett Harmony SHR hat Harmonic Bionics dieses Problem auf eigene Weise gelöst: Die Roboterarme sind kraftempfindlich und werden, anstelle der sonst üblichen Positionssollwerte, über Krafteingaben des Anwenders gesteuert.
Genau die richtigen Kräfte für die Übungen bereitzustellen, ist für die Physiotherapie sehr wichtig. Dass das System dabei Sicherheitsanforderungen erfüllen muss, ist in das Design des Roboters integriert. Er kann ausweichen, seine Bewegungen verlangsamen oder anhalten, selbst wenn nur geringe Kräfte auf ihn einwirken. Das robotische Exoskelett bietet somit eine hohe Sicherheit für Patienten und medizinische Fachkräfte.
Exoskelett ist für drei Anwendungen konzipiert
Das Exoskelett Harmony SHR soll in drei Praxisbereichen Vorteile bieten:
- in der neuro- und bewegungswissenschaftlichen Forschung,
- bei der Bewertung von Bewegungsstörungen und
- in der Rehabilitation.
Um den Konstruktionsaufwand zu senken, hat Harmonic Bionics bei der Entwicklung auf handelsübliche Standardprodukte gesetzt. Diese werden passend zu den Anforderungen in die Roboteraktuatoren integriert. Dabei mussten die Entwickler in der Konstruktionsphase manchmal kleine Kompromisse eingehen, zum Beispiel zwischen der Größe des Aktuators und dessen Tragfähigkeit oder Gewicht. Auch zwischen dem maximalen Drehmoment und der Drehmomentempfindlichkeit galt es zuweilen abzuwägen.
Das heute verfügbare Exoskelett ist stark genug, um die physiotherapeutischen Übungen zu unterstützen, und trotzdem leicht und handlich genug, um eine einfache Anwendung zu gewährleisten. Der patentierte Roboteraktuator nutzt dafür besondere Kraftaufnehmer. Diese sind jeweils mechanisch von allen Kräften getrennt, die nicht in ihren definierten Messbereich fallen. Dadurch misst jeder Kraftaufnehmer gezielt die spezifischen Kräfte, die an dem Gelenk auftreten, an dem er installiert ist. So ist eine möglichst hohe Messgenauigkeit des Kraftaufnehmers sichergestellt.
Um die Bewegungsfähigkeit der Patienten objektiv beurteilen zu können, zeichnen im Exoskelett mehr als 80 im System integrierte Sensoren 2000 Messungen pro Sekunde auf. So können Parameter exakt gemessen werden, darunter der Bewegungsumfang, die Kraft und die Anzahl der Wiederholungen.
Aktuatoren unterstützen Bewegungen und passen das Exoskelett an
Die geplante Kraftempfindlichkeit spielte auch beim Gestalten der Roboteraktuatoren eine Rolle. Im Harmony-SHR-Exoskelett werden zwei Arten von Aktuatoren verwendet: zum einen Drehaktuatoren mit Dreh- und Winkelsensorausgang. Sie unterstützen die Bewegungen der Patienten. Daneben sind Linearaktuatoren mit Positionsmeldern im Einsatz, um den Roboter an die jeweilige Körpergröße der Patientinnen und Patienten anzupassen.
Im Bewegungssystem sind mehrere Motoren verbaut, die der Schweizer Antriebsspezialist Maxon Switzerland AG in Sachseln entwickelt hat. Die EC-Flachmotoren bieten beispielsweise ein hohes Drehmoment in einem kompakten Paket, das sich trotz des begrenzten Bauraums ins Exoskelett integrieren ließ. Zudem konnten die Motoren mit Winkelsensoren ausgestattet werden.
Kompakt gebauter Motor ließ sich ins Exoskelett integrieren
Der EC-60-Flachmotor wurde gewählt, weil sein Außendurchmesser dem im Exoskelett verwendeten Harmonic-Drive-Getriebe ähnelt und er axial kompakt gebaut ist ist. Die Ausrichtung des Harmonic Drive zur Welle des Motors ist für die Lebensdauer des Aktuators wichtig. Schon kleine Abweichungen können zu vorzeitigem Verschleiß oder zum Ausfall führen.
Das Abtriebsdrehmoment des gesamten Aktuators beträgt ungefähr 30 Nm mit Spitzenwerten über 100 Nm. Der Kraftaufnehmer erreicht eine Auflösung von weniger als 10 mNm und ist für eine Lebensdauer von mehr als drei Millionen Umdrehungen ausgelegt.
Doch nicht nur die Motoren, auch die Steuerungen für das Exoskelett stellten die Schweizer aus einer Hand bereit – und wurden damit „zum Lieferpartner des Vertrauens“ für Exoskelett-Hersteller Harmonic Bionics.






{kind=link}