
Der menschlichen Hand nachempfundene Roboterhände zum feinfühligen Greifen lassen sich mit kommerziell verfügbaren Antrieben realisieren. Nur ein Hochgeschwindigkeits-Bus ist aber in der Lage, die Datenflut zu bewältigen. Die Medizintechnik könnte ähnliche Lösungen nutzen.
Komplexe Fünf-Finger-Hände können zukünftig auch filigrane Aufgaben übernehmen und einfache Zwei- oder Drei-Fingergreifer ersetzen. Denn mit vier Fingern lassen sich auch konische Teile fassen, ein Daumen dient als „Gegenlager“. Für den Einsatz an Robotern hat das Deutsche Zentrum für Luft- und Raumfahrt (DLR) deswegen in Zusammenarbeit mit dem Harbin Institute of Technologie (HIT) die DLR-HIT-Hand II entwickelt, bestehend aus fünf Fingern mit je vier Gelenken und drei Freiheitsgraden. Im Vergleich zur DLR-HIT-Hand I ist sie kleiner und leichter.
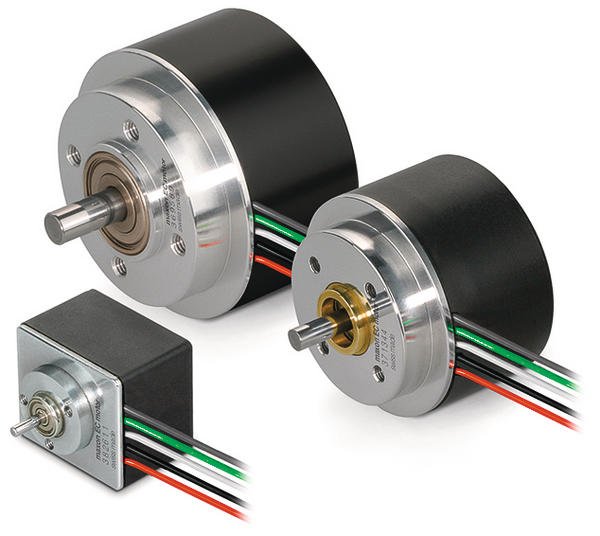
Um Mehrfingerhände mit separat ansteuerbaren Fingern und der menschlichen Hand nachempfundenen Gelenken herzustellen, muss neben der komplexen Mechanik auch eine ausgefeilte Steuerelektronik eingesetzt werden. Teilweise, etwa bei den Antrieben, lassen sich dazu aber schon kommerzielle Standardkomponenten heranziehen. Im vorliegenden Fall sind dies EC-Flat-Motoren der Maxon Motor AG aus Sachseln in der Schweiz. Pro Hand sind 15 bürstenlose Gleichstrommotoren des Typs EC 20 direkt in den Fingern verbaut. Sie erfüllen gleich mehrere Anforderungen, da sie
- preiswert und
- kommerziell verfügbar sind und darüber hinaus eine
- hohe Leistungsdichte bei geringem Bauvolumen besitzen.
Jeder Motor meldet über digitale Hallsensoren der Steuerung immer exakt die tatsächliche Position. Zusammen mit den Sensoren bilden die Motoren eine 15 g schwere Einheit von nur 10,4 mm Länge bei einem Durchmesser von 21,2 mm. Sie werden zudem mit den Harmonicdrive-Getrieben mit gleichem Durchmesser verbunden. Die 3-W-Motoren liefern ein maximales Drehmoment von 8,04 mNm und sind in einer 12- oder 24-V-Ausführung erhältlich. Ihr gutes dynamisches Verhalten und vorgespannte Kugellager sorgen dafür, dass sie präzise auf die Steuerbefehle ansprechen – selbst bei einem Drehrichtungswechsel.
Jedes Fingergelenk ist mit einem Winkel- und einem Drehmomentsensor ausgestattet. Beide Sensoren müssen anwendungsbedingt sehr hoch auflösen – so dass nur ein Hochgeschwindigkeits-Bus die anfallende Datenflut übertragen kann. Denn eine schnelle Rückkopplung ist für den Vergleich von Soll- und Istwert ausschlaggebend für die Funktion der Steuerung, besonders bei präzisen und filigranen Aufgaben. Der speziell für diese Anwendung entwickelte handinterne, echtzeitfähige 25-Mbps-Hochgeschwindigkeits-Bus basiert auf FGPAs (Field-programmable Gate Arrays), während für die externe serielle Verbindung von Hand und Steuerungsrechner nur drei Leitungen nötig sind. Die eigentliche Steuerung, ein Signalprozessor auf einer PCI-Einsteckkarte, ist in einen handelsüblichen PC integriert. Alle Sensordaten lassen sich auf dem Bildschirm anzeigen. su
Ihr Stichwort
- Leistungsdichte
- Hallsensoren
- Hochgeschwindigkeits-Bus
- Ansprechverhalten
- Drehrichtungswechsel
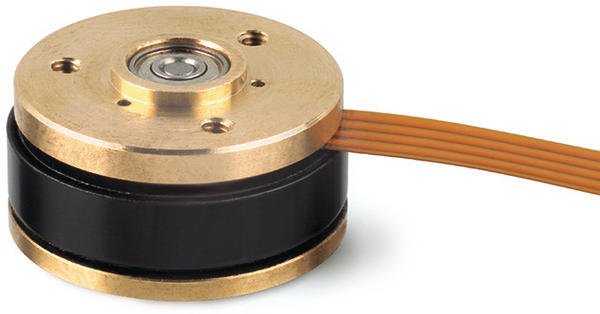
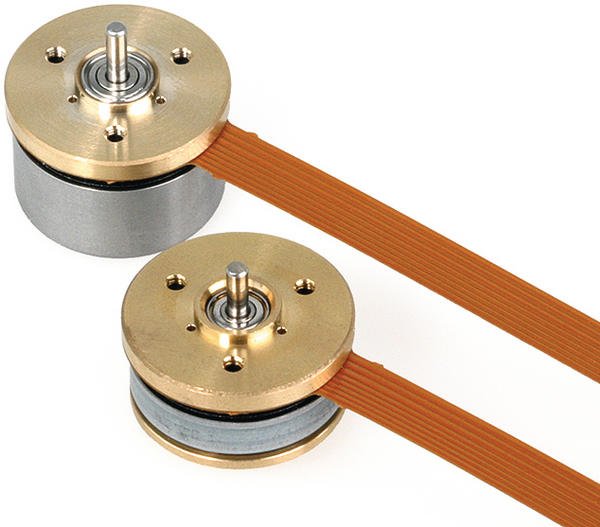
Mikro-Drehgeber
Durch seine kompakte Bauweise eignet sich der MILE-Encoder für Einsätze bei beschränkten Platzverhältnissen, wenn gleichzeitig ein präzise geregelter Antrieb gefordert ist. Der induktive Mikro-Drehgeber ist nach Angaben des Herstellers, der Maxon Motor AG, sicher vor elektromagnetischen Einflüssen, Staub oder Öl. Damit bietet er sich als Alternative zu optischen Drehgebern an, die sich nur mit kostentreibenden Abdichtungsmaßnahmen für solche Einsätze eignen, oder zu magnetischen Kodierern, die empfindlich auf Magnetfelder reagieren.
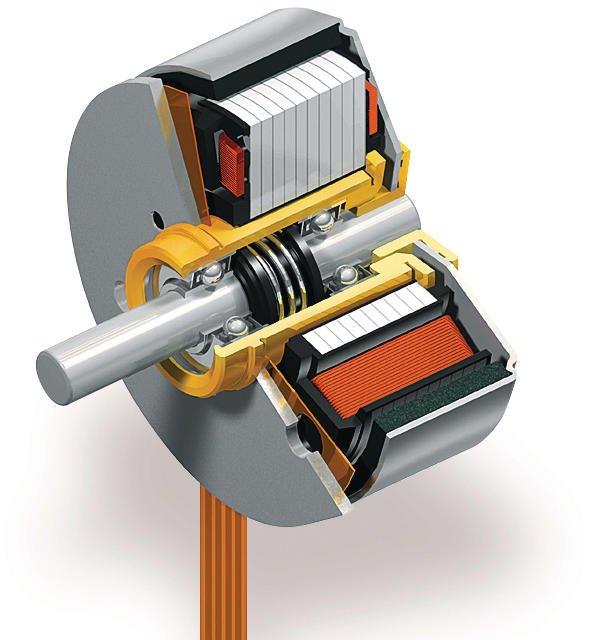
Bei magnetoresistiven (MR) als auch Hall-Sensor-basierten Kodierern gibt es zwar inzwischen Kompensationsmöglichkeiten, mit denen sich homogene Gleichfelder gut auskorrigieren lassen, nicht aber inhomogene Wechselfelder – etwa in der direkten Umgebung der Motorzuleitungen. Da bei Kleinmotoren aber oft gefordert ist, Motor- und Encoderleitungen in einem einzigen Kabel zu vereinigen, sind Alternativen gefragt.
Um den Problemen mit den optischen oder magnetischen Systemen aus dem Weg zu gehen, bieten sich kapazitive oder induktive an. Solche Kodierer sind bei größeren Motoren schon bekannt, bisher aber nicht in Kleinstmotoren realisiert. Um speziell auch Anwendungen in der Medizintechnik zu ermöglichen, entwickelte Maxon deshalb den nach eigenen Angaben mit 6 mm Durchmesser bislang kleinsten induktiven Drehgeber.
Unsere Webinar-Empfehlung

Erfahren Sie, was sich in der Medizintechnik-Branche derzeit im Bereich 3D-Druck, Digitalisierung & Automatisierung sowie beim Thema Nachhaltigkeit tut.
Teilen:





{kind=link}