Tumore im Innenohr zu entfernen, ist eine heikle Sache: Die Ärzte müssen meist das gesamte Felsenbein entfernen. Künftig reicht ein 5 mm breiter Tunnel durch den Knochen, den der Mini-Roboter NiLiBoRo fräst. Um sensible Bereiche wie Blutgefäße und Nerven macht er dabei einen großen Bogen. Auf der Compamed stellen die Forscher das neuartige System vor
Diagnose Innenohrtumor – an einer Operation führt kein Weg vorbei. Das Innenohr ist jedoch nicht gut zugänglich: Es wird von einem Hirnschädelknochen namens Mastoid verdeckt, auch Felsenbein genannt. Zudem durchziehen viele Blutgefäße und Nerven das umliegende Gewebe. Die Ärzte fräsen daher so viel vom Mastoid-Knochen heraus, bis sie jede dieser sensiblen Strukturen aufgespürt haben. Nur so können sie sicherstellen, sie nicht zu schädigen. Meist heißt das allerdings: Die Mediziner müssen den gesamten Knochen entfernen. Das entstandene Loch füllen sie nach der Operation mit Fettgewebe aus dem Bauch.
Künftig soll diese Operation schonender erfolgen: Dann reicht ein kleines Loch von 5 mm Durchmesser, um den Tumor aus dem Innenohr herauszuschneiden. Möglich macht es der NiLiBoRo, kurz für Nicht-Linearer Bohr-Roboter, den Forscher der Mannheimer Projektgruppe für Automatisierung in der Medizin und Biotechnologie des Fraunhofer-Instituts für Produktionstechnik und Automatisierung IPA entwickeln, gemeinsam mit ihren Kollegen der Technischen Universität Darmstadt, der Universität Aachen und des Universitätsklinikums Düsseldorf.
„NiLiBoRo kann erstmals auch um Ecken bohren“, sagt Lennart Karstensen, Wissenschaftler der Projektgruppe. Diese Eigenschaft ist es, die minimalinvasive Operationen von Innenohrtumoren erst ermöglicht.
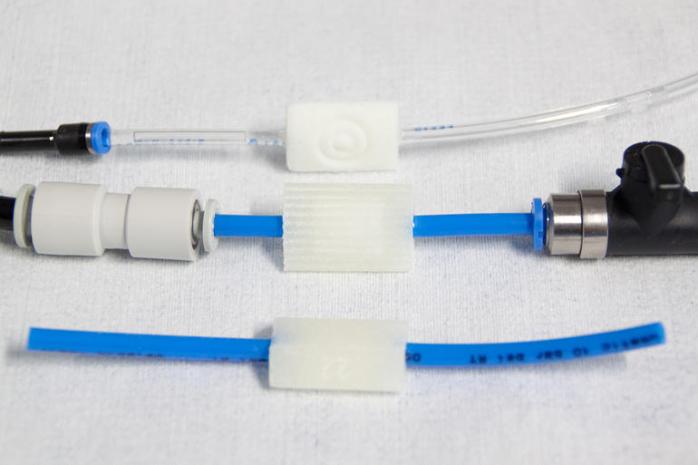
Doch wie schafft der ‚Wurm‘ es, sich auf Kurven und um Ecken herum durch den Mastoid-Knochen zu fräsen? „Der Wurm besteht aus einem ‚Kopf‘ und einem ‚Schwanz’“, erläutert Karstensen. „Diese beiden Teile sind über einen Faltenbalg flexibel miteinander verbunden.“ Auf seinem Weg durch den Knochen ist der Roboter über acht bis zwölf hydraulische Leitungen mit der „Außenwelt“, also den Steuerungsgeräten und Pumpen im Operationssaal, verbunden. Diese Leitungen lassen ihn in die richtige Richtung kriechen: Zunächst pumpen sie Hydraulikflüssigkeit in drei Kissen, die sich am hinteren Teil befinden. Die Kissen füllen den Raum zwischen Wurm und Knochen und fixieren den hinteren Mini-Roboter-Teil somit an Ort und Stelle. Nun strömt die Flüssigkeit in den Balg, der Wurm streckt sich quasi und bewegt seinen vorderen Teil dabei weiter in den Knochen hinein. Der Bohrer, der am Kopf befestigt ist, fräst den Weg frei. Jetzt wird der hintere Teil nachgezogen, ähnlich wie bei einem lebendigen Wurm: Dazu werden die Kissen am vorderen Teil aufgepumpt und halten diesen fest, während die Hydraulikflüssigkeit aus den hinteren Kissen entweicht. Die Leitungen saugen nun auch die Flüssigkeit aus dem Balg. Er zieht sich zusammen und schleppt den hinteren Teil hinter sich her. Stück für Stück arbeitet sich NiLiBoRo auf diese Weise vorwärts.
Im Labor und später im Operationssaal wird der Weg, den NiLiBoRo sich bahnt, haargenau überwacht: Über ein elektromagnetisches Trackingsystem, kurz EMT, das die Kollegen an der Technischen Universität Darmstadt entwickeln. Zudem nimmt ein Computertomograph sporadisch Bilder auf und überprüft die Position. Einen ersten Prototyp von NiLiBoRo haben die Forscher bereits gebaut. Momentan ist er noch fünfmal größer als die geplante Endversion. In zwei Jahren, so hoffen die Forscher, könnten die Ärzte den Miniroboter erstmals testen.
Teilen:





{kind=link}