

Der neue Handschuh soll virtuelle Welten wirklich greifbar machen. Entscheidend dabei: Alle seine Bauteile, die verschiedene Kräfte auf die Handoberfläche ausüben, sollen im 3D-Druck herstellbar sein. Hier geht es also um die Erforschung neuer Materialien, bei denen die Produktionsmethode von vorne herein mitgedacht wird.
Damit sich virtuelle Oberflächen echt anfühlen und die Objekte auch in der richtigen Größe greifbar werden, wollen die Forscherteams von der Schweizer École polytechnique fédérale de Lausanne (EPFL), der ETH Zürich und der Empa drei verschiedene Arten von Aktuatoren in den Handschuh integrieren: Auf der Unterseite der Finger können Noppen emporwachsen, die eine bestimmte Textur einer Oberfläche nachbilden. Im Bereich der Fingergelenke werden elektrostatische Bremsen montiert, die den Handschuh versteifen und die Gelenke blockieren. Das simuliert größere, feste Objekte, die beim Anfassen Widerstand bieten. Die dritte Art von Aktuatoren, die das virtuelle Erlebnis vervollständigen, nennen sich DEA, kurz für dielektrische elastische Aktuatoren. Diese DEA werden auf dem Handrücken eingesetzt; sie raffen die Außenhaut des Handschuhs soweit zusammen, dass er an allen Stellen optimal anliegt. Während des VR-Erlebnisses können sie außerdem Druck auf die Handoberfläche ausüben. DEA sind das Teilprojekt der Empa.
Künstliche „Muskeln“ per 3D-Druck
Dorina Opris, die Leiterin der Forschungsgruppe, hat jahrelang Erfahrung mit solchen elektroaktiven Polymeren gesammelt. „Diese elastischen Polymere reagieren auf elektrische Felder und ziehen sich zusammen wir ein Muskel“, erläutert die Forscherin der Empa. „Aber sie können auch als Sensor dienen, eine äußere Kraft aufnehmen und daraus einen elektrischen Impuls erzeugen. Wir denken auch daran, sie zur lokalen Energieerzeugung einzusetzen: Aus Bewegung kann so überall Strom entstehen.“
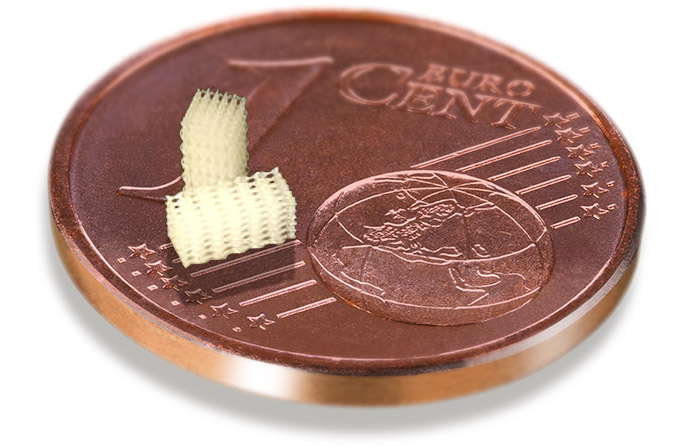
Das Manufhaptics-Projekt stellt die Forscherin und ihren Kollegen Patrick Danner vor neue Herausforderungen. „Bislang haben wir unsere Polymere mit Hilfe von Lösungsmitteln auf dem Weg einer chemischen Synthese hergestellt“, erläutert Opris. Nun muss alles ohne Lösungsmittel funktionieren: Geplant ist, bis zu 1000 feine Schichten aus dem 3D-Drucker übereinanderzulegen, immer abwechselnd das elektroaktive Polymer und eine stromleitende Schicht.
Für den 3D-Druck wie Handcreme
Dabei müssen die zwei verschiedenen Tinten, die dafür nötig sind, die genau passende Konsistenz haben, um aus der Düse des 3D-Druckers zu fließen. „Unser Projektpartner Jan Vermant von der ETH Zürich wünscht sich etwas mit ähnlichen Eigenschaften wie eine Handcreme. Es soll leicht aus dem Drucker kommen, und dann formstabil auf der Unterlage stehen bleiben“, erläutert Patrick Danner. Und danach muss sich diese „cremige“ Schichtstruktur noch zum passenden Polymer vernetzen.
Nach einer langen Reihe von Versuchen hat Danner eine vielversprechende Formulierung gefunden – eine Creme, die flüssig genug ist und zugleich formstabil, und aus der in einem einzigen Schritt elektroaktive Polymere entstehen können. Sein Kollege Tazio Pleji an der ETH Zürich, ein Mitarbeiter in Jan Vermants Forscherteam, hat das Material erfolgreich in seinem 3D-Drucker zu mehreren Schichten verarbeitet – immer abwechselnd Polymer und Elektrodenmaterial. Noch sind es keine 1000 Schichten, sondern nur etwa 10. Und noch funktioniert der „künstliche Muskel“ aus dem 3D-Drucker nicht zufriedenstellend.
Doch Opris und Danner sind zuversichtlich, die Aufgabe gemeinsam mit den Druckspezialisten der ETH Zürich zu meistern – als möglicherweise erstes Forscherteam der Welt.
Kontakt:
Empa
Dr. Dorina Opris
Functional Polymers
Telefon: +41 58 765 4304
E-Mail: dorina.opris@empa.ch
Patrick Danner
Functional Polymers
Telefon:. +41 58 765 4387
E-Mail: patrick.danner@empa.ch
www.empa.ch/web/s604/glove





{kind=link}