
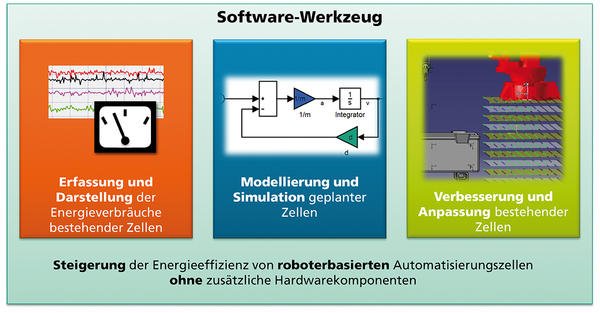
Ein neuer Software-Baukasten soll bei der Modellierung, Simulation und Optimierung des Energieverbrauchs von Industrierobotern helfen – bei bereits bestehenden Anlagen ebenso wie bei Anlagen, die sich noch in der Planung befinden.
Energieeffizienz spielte in der Robotik bisher eine eher untergeordnete Rolle, obwohl Roboter immer weitere Anwendungsfelder erobern. Ein Software-Baukasten soll jetzt dem Anwender helfen, seinen Roboter energiesparend einzusetzen, selbst wenn die Roboterzellen noch in Planung sind. Der Baukasten wurde am Fraunhofer IPA in Zusammenarbeit mit dem ISW der Universität Stuttgart im Rahmen des Forschungsprojekts „MoniSimO – Monitoring, Simulation und Optimierung von Roboteranwendungen zur Steigerung der Energieeffizienz“ entwickelt.
In der Praxis steht der Anwender von Robotertechnologie vor verschiedenen Fragen: Wie kann ich meine geplante Anlage so gestalten, dass sie nicht nur meine Anforderungen hinsichtlich Takt und Ausbringung erfüllt, sondern gleichzeitig auch energieeffizient arbeitet? Wie kann ich eine bestehende Anlage so anpassen, dass der Energieverbrauch gesenkt wird?
Die Klärung beider Fragen beginnt bei den Komponenten der Automatisierungszelle. Um festzustellen, welche Komponenten wie viel Energie verbrauchen und welche Möglichkeiten der Einsparung bestehen, wird sowohl Mess-Hardware benötigt als auch eine leistungsfähige Software, die die angefallenen Daten auswertet.
Mit dem detaillierten Wissen zum Energieverbrauch und dem Verständnis aller Komponenten ist es jedoch nicht getan. Laufende Anlagen können weder so lange modifiziert werden, bis der Energieverbrauch sich im „grünen“ Bereich befindet, noch können bei in Planung befindlichen Systemen Parameter-Einstellungen getestet werden. An dieser Stelle kommt das Hilfsmittel der Simulation zur Anwendung. Aus den Erkenntnissen, die im Rahmen der Energieerfassung gewonnen wurden, wird ein Energieverbrauchsmodell der Anlage erstellt. An diesem Modell können offline – also ohne tatsächliche Zelle – eine Vielzahl von Varianten getestet und bewertet werden.
Die Variantenvielfalt ist jedoch selbst bei mäßig großen Zellen so hoch, dass einfaches „Ausprobieren“ kaum Erfolge erzielt. Mithilfe eines Optimierungsalgorithmus werden die Parameter der Zelle wie zum Beispiel Fahrgeschwindigkeiten, Interpolationsarten, Greif- und Ablagepositionen, Gewichtsverteilungen am Roboter oder Positionierung von Maschinen so lange manipuliert, bis sich ein geringer Energieverbrauch einstellt.
Unsere Webinar-Empfehlung

Erfahren Sie, was sich in der Medizintechnik-Branche derzeit im Bereich 3D-Druck, Digitalisierung & Automatisierung sowie beim Thema Nachhaltigkeit tut.
Teilen:





{kind=link}