
Wer durch einen Unfall oder eine Erkrankung eine Hand verloren hat, kann einige alltägliche Bewegungen mit Hilfe einer Handprothese wieder ausführen. Mit modernen Prothesen lassen sich bereits Finger bewegen oder das Handgelenk drehen. Erforderlich sind dafür entweder eine Smartphone-App oder aber Muskelsignale aus dem Unterarm, die üblicherweise von zwei Sensoren detektiert werden.
Zum Beispiel lassen sich durch das Aktivieren des Beugemuskels im Handgelenk die Finger der künstlichen Hand schließen, um so einen Stift zu greifen. Ist der Streckmuskel im Handgelenk kontrahiert, lässt die Hand den Stift wieder los. Sind beide Muskeln gleichzeitig angespannt, lassen sich bestimmte Finger bewegen.
Mit der KI die Handprothese anders nutzen
„Diese Bewegungen muss ein Patient während der Rehabilitation lernen“, sagt Cristina Piazza, Professorin für Healthcare und Rehabilitation Robotics an der Technischen Universität München (TUM). Jetzt hat ihr Forschungsteam gezeigt, dass künstliche Intelligenz (KI) dazu beitragen kann, eine Handprothese intuitiver zu nutzen als bisher. Das Geheimnis liegt im „Synergieprinzip“ sowie der Unterstützung von 128 Sensoren am Unterarm.
Ottobock erhält Patent für neues Sensor- und Steuerungskonzept
Fürs Greifen aktiviert das Gehirn eine Gruppe von Muskelzellen
Was versteht man unter dem Synergieprinzip? „Wir wissen aus neurowissenschaftlichen Studien, dass gewisse Muster in Experimenten immer wieder auftauchen, sowohl in der Kinematik als auch hinsichtlich der Muskelaktivierung“, sagt Piazza. Diese Muster geben Hinweise darauf, wie das menschliche Gehirn mit der Komplexität von biologischen Systemen umgeht. Das Gehirn aktiviert dabei eine Gruppe von Zellen gleichzeitig.
Zentrum für Bionic Intelligence Tübingen Stuttgart gegründet
Auch im Unterarm ist das so. Piazza: „Wenn wir mit unserer Hand ein Objekt greifen wollen, etwa einen Ball, bewegen wir unsere Finger synchron, und sie passen sich sofort an die Form des Objektes an, sobald es berührt wird.“ Die Forschenden nutzen dieses Prinzip nun für das Design und die Steuerung von künstlichen Händen, indem sie neue Lernalgorithmen einsetzen.
Personalisierte Medizin: Noch entscheiden Experten besser als die KI
KI soll fließende Bewegung für Handprothese und Roboter ermöglichen
Für Menschen ist die intuitive Bewegung ganz normal. Aus Roboterperspektive sieht das anders aus. Wenn eine künstliche Hand einen Stift greift, führt sie viele einzelne Schritte nacheinander aus. Erst bestimmt sie den Ort, von dem sie etwas greifen will. Dann führt sie langsam die Finger zusammen, bevor sie schließlich den Stift greift. Das Ziel der Forschenden besteht darin, eine einzige fließende Bewegung daraus zu machen. „Mit Hilfe von Maschinellem Lernen können wir die Steuerung anpassungsfähiger machen“, sagt Patricia Capsi Morales, Senior Scientist im Team von Piazza.
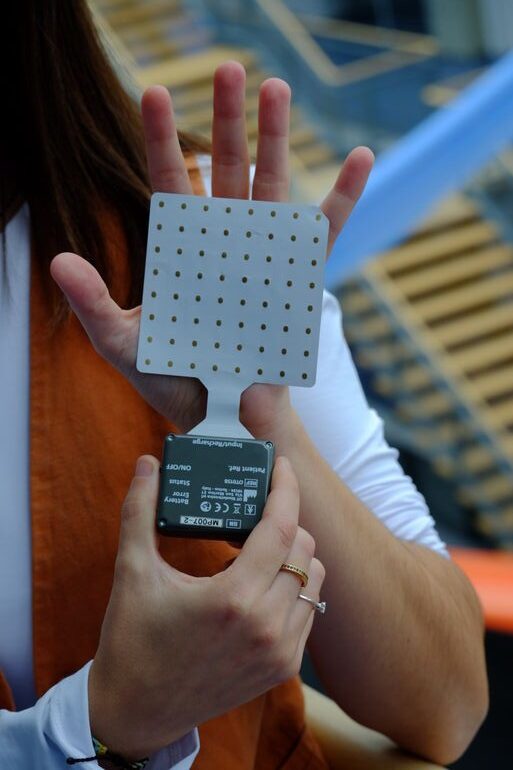
Um zu untersuchen, was auf der Ebene des zentralen Nervensystems geschieht, arbeiten die Forscher mit zwei Sensorfolien: eine für die Innen- und eine für die Außenseite des Unterarms. Jede Folie enthält bis zu 64 Sensoren. Die Methode schätzt auch ab, welche elektrischen Signale die Motoneuronen im Rückenmark übertragen haben. Je nachdem, ob ein Mensch eine Faust macht, einen Stift greift oder ein Marmeladenglas öffnen will, ergeben sich laut Forscherin Capsi Morales „charakteristische Merkmale der Muskelsignale“ – eine Voraussetzung für intuitive Bewegungen.
Prothesen intuitiv oder durch Erlernen nutzen
Die aktuelle Forschung konzentriert sich auf die Bewegung des Handgelenks und der gesamten Hand. Sie zeigt, dass die meisten Menschen (acht von zehn) die intuitive Bewegung von Handgelenk und Hand bevorzugen. Das ist zudem der effizientere Weg.
Dennoch: Zwei von zehn Personen lernen, mit der weniger intuitiven Methode umzugehen und werden am Ende sogar präziser. „Unser Ziel ist es, den Lerneffekt zu untersuchen und die richtige Lösung für jeden Patienten zu finden“, erläutert Capsi Morales.
Kontakt:
TUM
Cristina Piazza
Professor of Healthcare and Rehabilitation Robotics
E-Mail: Cristina.piazza@tum.de
www.ce.cit.tum.de/nhcr/
https://ieeexplore.ieee.org/document/10304809







{kind=link}