
Wenn der Chirurg die Instrumente im Bauchraum des Patienten einsetzt, dürfen die gesunden Organe nicht im Weg sein – ein Greifer hält sie beiseite. Doch bei minimal-invasiven OP-Techniken hat der Arzt keine Möglichkeit, die Kraft dieses Greifers gut zu dosieren: Er fühlt nicht, wie fest er mit dem Instrument zupackt, und meist sieht er auch nicht, was im Gewebe um den Greifer herum passiert, weil das Endoskop seine Kamera auf die zu operierende Stelle richtet.
Diesen Mangel an Fingerspitzengefühl soll ein haptisches Feedback ersetzen: Dafür entwickeln Forscher an der TU Darmstadt im Rahmen des Projektes Flexmin einen neuen Typ von OP-Roboter. Anders als bisher verfügbare Roboter basiert er auf einer Parallelkinematik, deren Präzision und Dynamik im Maschinenbau schon vielfach genutzt wird. Allerdings haben die Darmstädter ihrem Roboter mehr Freiheitsgrade verschafft, als ein nach dem gleichen Prinzip aufgebauter Roboter im Maschinenbau hat: Im Projekt Flexmin wird nicht nur die Translation der Stäbe genutzt, sondern auch Rotation ist möglich, um bestimmte Positionen zu erreichen.
Paralallelkinematik bringt dem OP-Roboter Vorteile
Die Präzision und Dynamik beruhen allerdings auf einer weiteren Eigenschaft einer solchen Kinematik: Sie bildet ein steifes System. Und das ist der entscheidende Punkt, um in der Chirurgie den Haptik-Vorteil zu bieten. Ein System, das so steif ist, dass selbst schwere Organe wie der Darm gegriffen und in Position gehalten werden können, kann auch Messdaten für das haptische Feedback liefern.
„Wir erfassen die Kräfte, die in der Struktur der Parallelkinematik auftreten, wir messen die Beschleunigung an der Spitze sowie die Kräfte im Greifer“, erläutert Dr. Christian Hatzfeld von Institut für Elektromechanische Konstruktionen EMK der TU Darmstadt. Aus den Messwerten kann die Steuerung im System ableiten, ob da gerade ein hartes Objekt oder ein weiches Gewebe gegriffen wird. Entsprechend werden die Greifkräfte angepasst – auch am Bediengerät, so dass der Chirurg merkt, dass er gegebenenfalls mehr oder weniger Kraft aufwenden muss. „Dem Chirurgen vermittelt das System ausreichend Gefühl dafür, was er mit dem Roboter im Bauchraum tut“, sagt Hatzfeld, und damit sinke für den Patienten das Risiko, dass gesundes Gewebe Schäden erleidet.
Das Ableiten dieser Informationen aus den Zustandsdaten des Roboters wird als pseudohaptisches Feedback bezeichnet. Es kommt dem Wunsch der Ärzte nach mehr Informationen über das Geschehen im Bauchraum bei minimal-invasiven Eingriffen entgegen – und eine Studie am Tiermodell soll im Flexmin-Projekt zeigen, welchen Nutzen das im Einzelnen für eine OP-Situation bringt.
Reißendes Gewebe rechtzeitig erkennen
Technisch gesehen sind die Möglichkeiten des Feedbacks damit aber noch nicht ausgereizt. Aus den Zustandsdaten des Roboters lässt sich vielleicht noch mehr ableiten: Wenn zum Beispiel Gewebe reißt, kündigt sich das zunächst mit kleinen Veränderungen an. Wenn ein erfahrener Arzt ein Organ in Händen hält, merkt er ab einem gewissen Punkt, dass sich da etwas tut, und kann reagieren. „Wir wollen überprüfen, woraus das entscheidende Signal besteht, das Handlungsbedarf zeigt“, sagt Hatzfeld. Sobald das bekannt ist, lassen sich entsprechende Werte technisch erfassen – und vermutlich sogar früher und genauer, als ein Mensch sie erfühlt.
Eine andere mögliche Weiterentwicklung wäre der Einbau spezieller Sensoren in die Spitze des Roboters. „Damit könnten wir mehr erfassen, als die menschliche Haut an den Händen fühlt.“ Doch das – insbesondere die Entwicklung eines solchen Sensors – ist derzeit nicht geplant.
Prototyp des OP-Roboters wird bereits getestet
In den bisherigen fünf Jahren des Projekts haben die Forscher aber einen Prototypen des Roboters entwickelt, der seine Fähigkeiten in Mock-up-Experimenten an Tierorganen unter Beweis stellen konnte. Da wurde mit verschiedenen Instrumentenaufsätzen positioniert, gehalten, geschnitten und genäht. „Die Ärzte haben das haptische Feedback gelobt, aber auch, wie schnell und genau sie an die gewünschten Stellen gelangen konnten“, berichtet Projektmitarbeiter Hatzfeld.
Dabei zeigte sich, dass die Vorerfahrungen der Ärzte die Bewertung beeinflussten: Wer das offene Operieren gewohnt war, kam mit dem Roboter besser zurecht als Mediziner, die vor allem minimal-invasive Techniken gewohnt sind. Denn bei Eingriffen durch einen einzigen Schnitt, den Single-Port-Operationen, werden die Instrumente gewöhnlich überkreuzt geführt. „Das aber ist bei einer Parallelkinematik nur eingeschränkt möglich“, erläutert Hatzfeld.
Von einem markfähigen System
sind die Darmstädter noch ein Stück entfernt. „Es liegt noch Einiges an Weiterentwicklung vor uns – und wir würden
uns freuen, wenn wir diese mit Medizintechnikunternehmen angehen könnten“, sagt der Wissenschaftler. (op)
Über das Flexmin-Projekt
Vor fünf Jahren startete das Projekt Flexmin, das einen OP-Roboter mit haptischem Feedback hervorbringen soll. Daran beteiligt ist der Fachbereich Elektrotechnik und Informationstechnik der TU Darmstadt mit den Fachgebieten Mikrotechnik und Elektrische Systeme sowie Mess- und Sensortechnik. Für die Robotertests kooperieren die Forscher mit der Arbeitsgruppe Chirurgische Technologie und Training des Uniklinikums Tübingen.
Der Roboter für die minimal-invasive
Chirurgie im Bauchraum wird speziell für die Entfernung von Tumoren des Enddarms entwickelt. Er soll einen transanalen Eingriff ermöglichen – der Chirurg erreicht den Tumor also über eine natürliche Körperöffnung (Notes-Technik, Natural Orifice Transluminal Endoscopic Surgery).
Der Roboter wird als funktionierendes Gesamtsystem mit Roboter und Bediengerät entwickelt. Einzelne Aspekte wie die Kraftmessung im Greifer für ein haptisches Feedback lassen sich grundsätzlich auch auf andere Robotersysteme übertragen.
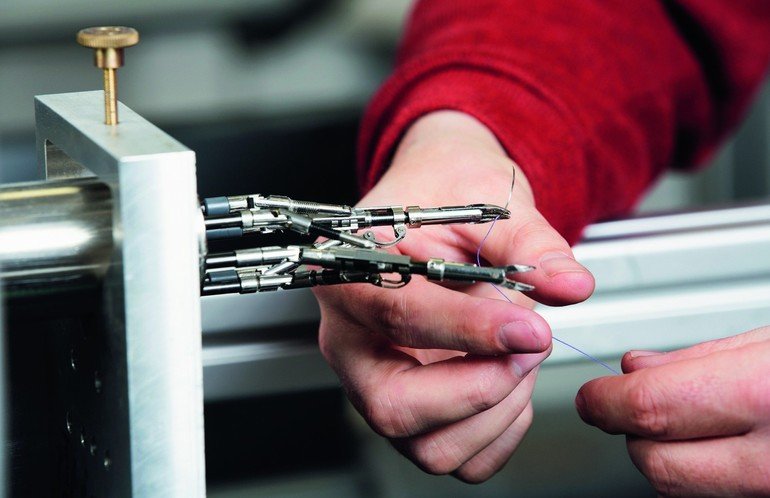
 Die Elemente der Parallelkinematik sind besonders beweglich: sowohl Translation als auch Rotation sind möglich. Für die Tests wurde eine Reihe von Instrumenten und Greifern erstellt, die sich an der Spitze anbringen lassen
Die Elemente der Parallelkinematik sind besonders beweglich: sowohl Translation als auch Rotation sind möglich. Für die Tests wurde eine Reihe von Instrumenten und Greifern erstellt, die sich an der Spitze anbringen lassenBild: TU Darmstadt / Carsten Neupert





{kind=link}