
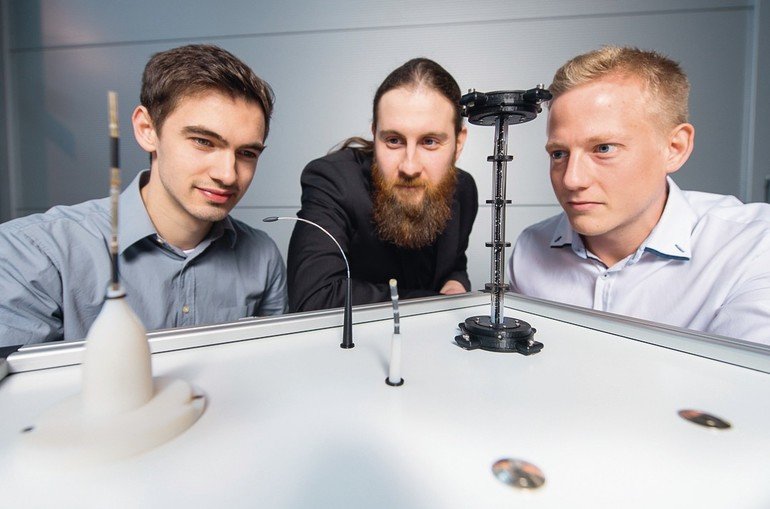
Sie schlängeln sich präzise um Windungen und Ecken, bewegen sich frei in alle Richtungen: Eine Arbeitsgruppe an der Universität des Saarlandes arbeitet gemeinsam mit Forschern der TU Darmstadt an dünnen, präzise steuerbaren künstlichen Tentakeln. Diese könnten in Zukunft als Führungsdraht bei Herzoperationen oder als Endoskop bei Magen- und Darmspiegelungen zum Einsatz kommen. Dafür statten die Forscher die Tentakel mit zusätzlichen Funktionen wie einer versteifbaren Spitze für Stoßbewegungen oder einem Greifer aus. Auch große Roboterrüssel sind möglich – die Technik ist skalierbar.
Dreh- und Angelpunkt sind die künstlichen Muskeln. Sie bestehen aus haarfeinen Drähten aus Nickel-Titan. „Die Legierung Nickel-Titan besitzt ein Formgedächtnis“, sagt Prof. Stefan Seelecke. Fließt Strom durch einen solchen Draht, erwärmt er sich, und seine Kristallstruktur wandelt sich so um, dass er sich verkürzt. Ohne Strom kühlt er ab und wird wieder lang.
Das Saarbrücker Team bündelt die Drähte wie Muskelfasern. Mehrere Drähte geben mehr Wärme ab, so erreicht man schnelle Kontraktionen. „Die Drähte haben die höchste Energiedichte aller bekannten Antriebsmechanismen: Auf kleinem Raum entwickeln sie hohe Zugkraft“, erläutert Seelecke. Bei den Roboterarmen werden die Drahtstränge als Beuge- und Streckmuskulatur verbunden, dies bringt eine fließende Bewegung hervor.
Die Tentakel ist hochpräzise steuerbar und kann als Werkzeug mehrere Funktionen erfüllen. Die Forscher modellieren und programmieren hierzu Bewegungsmuster auf einen Halbleiterchip. Das System kommt dabei ohne Sensoren aus: Die Drähte selbst liefern alle nötigen Daten. Die Roboterarme arbeiten auch unabhängig von schwerem Gerät im Hintergrund. Alles, was die Drähte benötigen, ist Strom.






{kind=link}