
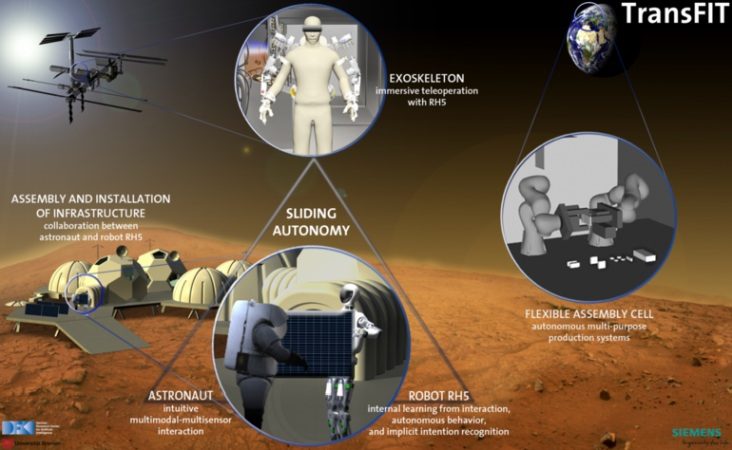
Flexibel, (teil-)autonom und mit Fingerspitzengefühl – das nun gestartete Projekt Transfit soll Robotersystemen den Infrastrukturaufbau im Weltraum ermöglichen und Einsatzoptionen im Bereich Industrie 4.0 eröffnen. Transfit steht für: „Flexible Interaktion für Infrastrukturaufbau mittels Teleoperation und direkte Kollaboration und Transfer in Industrie 4.0“. Ziel der Kooperation zwischen dem Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) GmbH, der Universität Bremen und der Siemens AG ist die Entwicklung robotischer Fähigkeiten, welche die Ausführung komplexer Montagearbeiten autonom und zusammen mit dem Menschen ermöglichen.
Passt für den Weltraum und Industrie 4.0
Im Mittelpunkt von Transfit steht die Entwicklung von robotischen Lösungen für (teil-)autonome Anwendungen im Rahmen von Weltraummissionen. Das Projekt ist Teil der DFKI Space-Roadmap, bei der es darum geht, Grundlagen für den Einsatz von mobilen, autonomen Robotern bei der extraterrestrischen Exploration zu schaffen.
Dazu soll ein Kooperationsszenario von Astronauten und Robotern umgesetzt werden, die gemeinsam eine Infrastruktur aufbauen, wobei sie dabei nach dem Konzept der „Sliding Autonomie” unterschiedlich stark interagieren: von reiner Teleoperation über Teleoperation mit teilautonomen Funktionen und Autonomie mit „Operator in the Loop” bis hin zu kompletter Autonomie. Ziel der Interaktion ist aber nicht nur die Aufgabenteilung, sondern auch, dass der Roboter aus der Unterstützung durch den Menschen lernt, um immer autonomer agieren und seine Einsetzbarkeit und Anpassbarkeit an die speziellen Anforderungen optimieren zu können.
Voraussetzung für die schnelle Anpassbarkeit des Verhaltens ist die Entwicklung einer einfach bedienbaren Steuerungssoftware, die schnelle Anpassungen vor Ort und während einer Mission ermöglicht. Ein ebenso wichtiger Baustein ist der Einsatz von Technologien, die der Vermittlung von Intentionen dienen, sowohl der des Roboters als auch der des Menschen.
Hohes Transferpotenzial
„Wir verfolgen das Ziel, die Schlüsseltechnologie Robotik nicht nur für die Raumfahrt zu nutzen, sondern auch in industrielle Anwendungen umzusetzen. Aufgrund ihrer Robustheit und Automation verfügen robotische Raumfahrtsysteme über ein hohes Transferpotenzial, sie funktionieren eigenständig sowie ohne Wartung über lange Zeiträume und Entfernungen hinweg“, so Prof. Frank Kirchner, Leiter des DFKI Robotics Innovation Centers und der Arbeitsgruppe Robotik an der Universität Bremen.
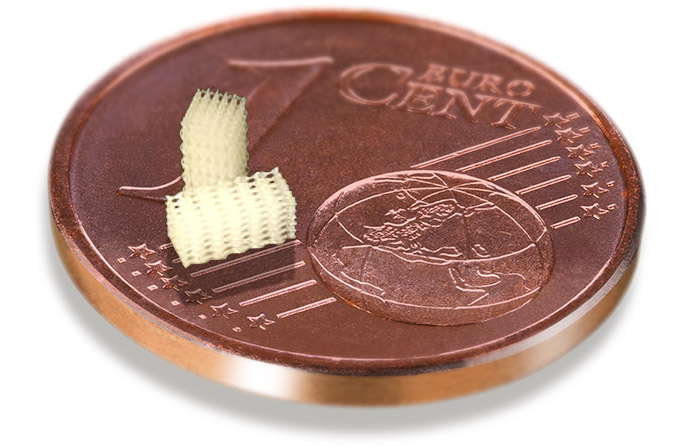
Zu diesem Zweck entwickeln die Projektpartner unter Federführung von Siemens und auf Basis der im Projekt erarbeiteten Lösungen eine hochflexible und kooperative Montagezelle, mit der sich komplexe Baugruppen fertigen lassen, etwa kompakte mechanische oder elektromechanische Geräte, die nach heutigem Stand rein manuell montiert würden. Die Zelle soll in der Lage sein, abstrakte Aufgabenspezifikationen autonom und ohne detaillierte Programmierung in Zusammenarbeit mit einem menschlichen Werker umzusetzen.
www.dfki.de/robotik/de/forschung/projekte/transfit.html





{kind=link}