


Im Bereich der intelligenten, interaktiven und lernfähigen Robotik nimmt die Forschung stark an Fahrt auf. Die nächste Generation von Robotermanipulationssystemen soll nun durch Künstliche Intelligenz (KI) in der Lage sein, autonom Aufgaben mit begrenzter menschlicher Überwachung auszuführen und mit Objekten unabhängig von deren Material, Größe und Form interagieren zu können. Durch die Interaktion mit Mensch und Umgebung sollen diese Systeme gleichzeitig neue Kenntnisse erlernen, die ihren Einsatz für unvorhergesehene, nicht vorprogrammierte Aufgaben ermöglichen. Dieser Einsatz reicht von industrieller Fertigung über die Logistik bis hin zur Servicerobotik und tragbaren Geräten wie Exoskeletten und Prothesen. Das bedeutet, dass diese Robotersysteme bestimmte Sicherheitsanforderungen erlernen und einhalten müssen. Sie müssen erkennen, wenn sie eine Aufgabe nicht unter den geltenden Sicherheitsanforderungen lösen können, damit ein Vertrauen der Menschen in die Roboter entstehen kann.
Roboter sollen intelligent und sicher handeln
„Das Intelliman-Projekt konzentriert sich auf die Frage, wie ein Roboter effizient lernen kann, um Aufgaben zielgerichtet, hochleistungsfähig und sicher zu erledigen“, sagt Prof. Gianluca Palli, Koordinator des Intelliman-Projektes an der Abteilung für Elektrotechnik, Elektronik und Informationstechnik „Guglielmo Marconi“ der Università di Bologna (Italien). „Der Roboter soll dabei Interaktionsfähigkeiten mit Menschen, Objekten und seiner Umgebung erlernen und daraus abstrahierbare Interaktionsszenarien entwickeln. Auch Eigenschaften und Funktionalitäten der Objekte soll der Roboter über die gezielte Interaktion ableiten können. Wahrnehmung und Akzeptanz durch die Nutzer sollen dabei durchgehend in Betracht gezogen werden.“
KI in verschiedenen Anwendungsszenarien
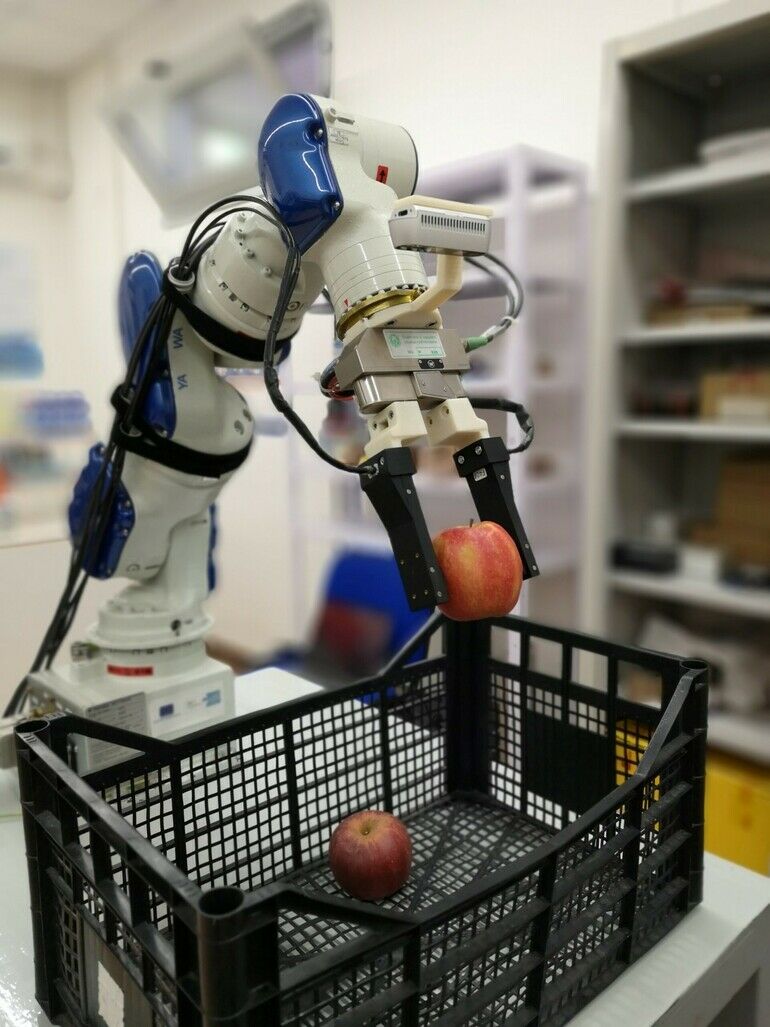
In komplexen und unterschiedlichen Anwendungsszenarien wollen die Intelliman-Wissenschaftler Probleme des Greifens und Ablegens flexibler Objekte untersuchen: in der Oberarm-Prothetik, bei alltäglichen Küchenaktivitäten, bei der flexiblen Fertigung von Kabelsätzen für Automobilkabelbäume und bei der Handhabung von frischen Lebensmitteln für Supermarktlogistikanwendungen. Dieses heterogene Set von Nutzungsszenarien mit unterschiedlichsten An- und Herausforderungen soll es ermöglichen, verschiedene Lösungen für die Interaktionsproblematik zu entwickeln.
Kontakt:
Università di Bologna, Italien
Prof. Dr. Gianluca Palli
Telefon: +39 (0) 51 20 9 3186
E-Mail: gianluca.palli@unibo.it
www.intelliman-project.eu
Bayerische Forschungsallianz
MBA Gabriela Blumberger
Wissenschaftliche Referentin und Projektmanagerin Intelliman
Telefon: +49 (0)89 9901888 132
E-Mail: blumberger@bayfor.org






{kind=link}