


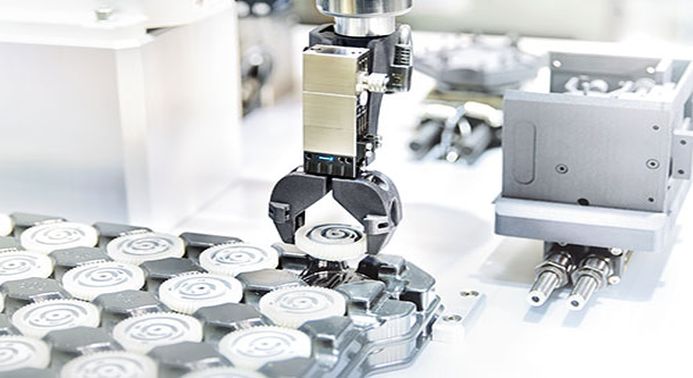
Elektromotoren sind in der Regel keine Einzelkämpfer, sondern müssen für die meisten Anwendungen mit Getrieben zur Drehzahluntersetzung sowie Encodern kombiniert werden. Damit die Komponenten perfekt aufeinander abgestimmt sind und der Montageaufwand möglichst gering bleibt, empfiehlt es sich, die einzelnen Komponenten als Komplettlösung aus einer Hand zu beziehen. Auch wenn der Einbauplatz knapp bemessen ist und drehmomentstarke Antriebe gefordert sind, die aufgrund der Einbausituation in axialer Richtung möglichst kurz bauen, gibt es jetzt eine praxisgerechte Systemlösung, die sich besonders für Anwendungen in der Robotik, bei Gelenken von Prothesen, in der Laborautomation, bei Pumpen, in der Medizintechnik oder bei der Ausstattung von Flugzeugkabinen eignet.
Der Antriebsspezialist Faulhaber hat einmal mehr seine Kompetenz als Systemanbieter bewiesen und seine BXT-Flachmotorenbaureihe um passende Getriebe und integrierte Encoder sowie Speed Controller erweitert, die ebenfalls in axialer Richtung ungewöhnlich kurz ausfallen. Alle Komponenten wurden dahingehend optimiert, dass sie perfekt zusammenspielen. Mit drei Baugrößen sind viele unterschiedliche Antriebsaufgaben lösbar. Bei einer Unterarm-Prothese bieten sich beispielsweise der kleinste Antrieb mit 22 Millimeter Durchmesser für die Hand an und der 16 Millimeter lange Motor für den Ellenbogen. Weiterhin finden sich Einsatzmöglichkeiten bei Robotergreifern, in der industriellen Automation, in humanoiden Robotern und selbst in der Biorobotik für motorisierte – also kraftunterstützende – Hand-Exoskelette kommen die kleinen kompakten Antriebssysteme infrage. Dank ihrer guten Gleichlaufeigenschaften eignen sie sich aber auch zum Beispiel für Dialysegeräte oder medizinische Pumpen.
Innovative Wickeltechnik für mehr Drehmoment
Die Motoren wurden auf Basis der klassischen Außenläufer-Bauweise entwickelt. Dank innovativer Wicklungstechnik und optimierter Auslegung liefern die bürstenlosen DC-Servomotoren Drehmomente bis zu 134 Nanometer bei einem Durchmesser von 22 Millimeter, 32 Millimeter beziehungsweise 42 Millimeter und liefern bei hohem Wirkungsgrad eine Dauerleistung von bis zu 100 Watt. Damit übertreffen die kompakten Motoren die in dieser Antriebsklasse normalerweise üblichen Standards deutlich. Vor allem das Verhältnis von Drehmoment zu Bauraum und zu Gewicht ist wesentlich besser als der Marktstandard. Durch den hohen Kupferfüllfaktor und die Auslegung der Polschuhe ist das Magnetfeld stark und das Rastmoment sehr klein. Die Motoren, die mit Drehzahlen bis zu 10.000 min -1 arbeiten, werden mit oder ohne Gehäuse angeboten, was den Anwendungsbereich noch einmal erweitert.
Metallische Planetengetriebe mit zahlreichen Untersetzungsverhältnissen
Für die Drehzahluntersetzung der Flachmotoren eignet sich die Metall-Planetengetriebe-Familie GPT, die ebenfalls durch kompakte Abmessungen und hohes Drehmoment überzeugt. Die rein metallenen Getriebe erreichen Leistungswerte, die mit denen deutlich teurerer Technologien, die zum Beispiel keramische Komponenten nutzen, vergleichbar sind. Die Getriebe stehen mit motorkonformen Durchmessern zur Verfügung und bieten in bis zu vier Stufen sehr fein abgestufte Untersetzungsverhältnisse von 3:1 bis 1.294:1. Jede Stufe wurde auf Höchstleistung im Hinblick auf Drehmoment und Geschwindigkeit optimiert. Die Getriebe erreichen je nach Durchmesser Dauerdrehmomente von 1, 8 beziehungsweise 18 Nanometer. Kurzzeitig sind auch höhere Drehmomente möglich.
Zudem sind die Getriebe sehr robust und tolerieren sowohl ständige Belastung als auch schnelle Lastwechsel. Dabei wurden sie für einen begrenzten axialen Bauraum entwickelt und sind deutlich kürzer als andere Modelle mit dem gleichen Durchmesser. Die einstufige 22-Millimeter-Ausführung beispielsweise ist lediglich circa 18 Millimeter lang, die vierstufige circa 37 Millimeter. Beim 42-Millimeter-Getriebe liegen die Werte bei knapp 31 Millimeter beziehungsweise circa 68 Millimeter.
Drehgeber im Gehäuse mit hoher Positioniergenauigkeit
Alle BXT-Motoren sind mit digitalen Hallsensoren ausgestattet und können dank ihrer hohen Polzahl so bereits genau in der Drehzahl geregelt werden. Für präzise Positionieraufgaben steht der magnetische Encoder IEF3-4096 zur Verfügung. Der Encoder wird vollständig in die gehäusten Motorvarianten integriert, wobei sich der gesamte Antrieb lediglich um 6,2 Millimeter verlängert. Trotz der flachen Bauform bietet er drei Kanäle mit Indexfunktion, einen Line Driver und eine hohe Auflösung bis 4.096 Impulse pro Umdrehung. Die Kombination aus Motor und Encoder ist dann eine ideale Systemlösung, wenn auf engem Raum sehr präzise positioniert werden muss und gleichzeitig große Drehmomente gefordert sind, zum Beispiel in Robotik, Medizintechnik, Laborautomation oder der industriellen Automation.
Integrierte Speed Controller komplettieren das Portfolio
Ab April 2020 gibt es auch Speed Controller für die BXT-Motoren. Sie sind in die gehäusten Versionen der BXT-Motoren integriert und verlängern diese lediglich um 6,2 Millimeter. Das durchdachte Aufbaukonzept ermöglicht es, sowohl der Encoder als auch der Speed Controller im gleichen Gehäuse unterzubringen und eine Vielzahl von Gleichteilen zu verwenden. Für die Drehzahlregelung werden die in den Motoren integrierten digitalen Hallsensoren genutzt. Ein breiter Drehzahlbereich von 200 min -1 bis zu 10.000 min -1 steht damit zur Verfügung. Die kompakte Kombination aus Motor und Speed Controller ist ideal für platzkritische Anwendungen und bietet eine einfache Installation und Inbetriebnahme.





{kind=link}