Auf dem Gebiet innovativer Robotergelenke hat das Deutsche Patentamt im Juli zwei Wissenschaftlern aus Chemnitz ein Patent erteilt: Ihr sogenanntes nachgiebiges Gelenk eignet sich für eine sichere Interaktion zwischen Mensch und Roboter. Eine Lizensierung steht kurz bevor.
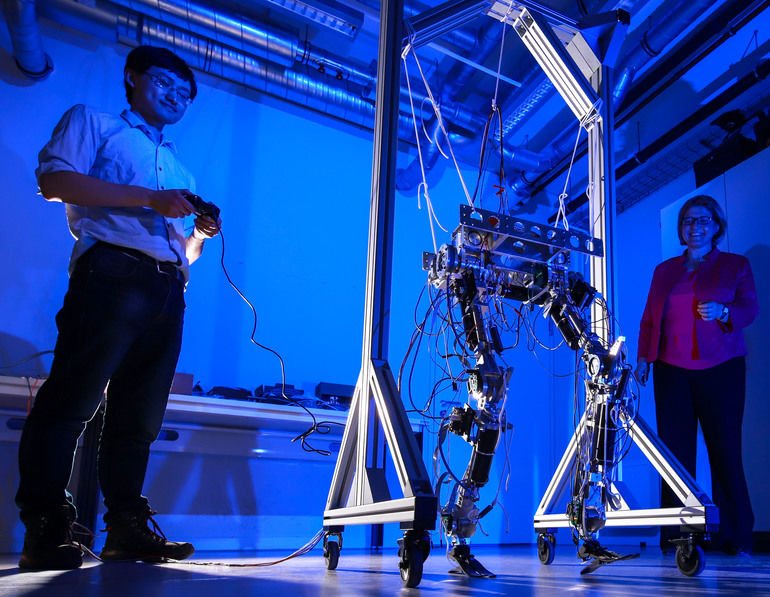
Die Erfinder des Gelenks, der Doktorand Hongxi Zhu und Prof. Ulrike Thomas, arbeiten an der TU Chemnitz. Thomas ist Leiterin der Professur Robotik und Mensch-Technik-Interaktion sowie stellvertretende Sprecherin des Sonderforschungsbereichs Hybrid Societies. Das beiden erteilte Patent ist auf diesem Gebiet das zweite in Deutschland. Ein älteres wurde durch das Deutsche Zentrum für Luft-und Raumfahrt angemeldet.
Neues Robotergelenk mindert Verletzungsgefahr
Bisherige Gelenke für Roboter wurden mit Sensoren – meist Kraftsensoren – ausgestattet, um die Kontaktkräfte im Fall einer Kollision messen und gegebenenfalls ausweichen zu können. Andere Lösungen greifen auf externe optische Sensoren zurück und überwachen so die Distanz zwischen Roboter und Mensch.
Das neue Gelenk kann dank einer Feder Energie aufnehmen. So kann Kollisionsenergie abfließen, und der Roboter darf sich in der Nähe eines Menschen schneller bewegen, ohne dass dieser gefährdet wird. International gibt es noch einige Gelenke, in denen Federn Kollisionsenergie absorbieren. Die Herausforderung liegt darin, dass sich die Federhärte nicht-linear einstellen lassen muss, so dass bei Arbeiten, die eine hohe Kraft erfordern, der Roboter selbstständig adaptiv die Federhärte einstellen kann, um so auch einen Nagel in eine Wand schlagen zu können.
„Mit dem Gelenk ist es uns gelungen, einen sehr großen Bereich abzudecken und gleichzeitig ein kompaktes Design zu bieten“, sagt Thomas. Ein weiterer Vorteil: Die gespeicherte Energie kann zur Beschleunigung einer Bewegung verwendet werden, so dass ein humanoider Roboter Bälle werfen oder springen kann.
Harmonic-Drive-Getriebe lieferte Inspiration für kollaborierende Roboter
Die erste Idee zu dieser Lösung hatte Thomas beim Betrachten eines Harmonic-Drive-Getriebes – eines Wellengetriebes mit hoher Übersetzung –, das ebenfalls eine elliptische Form nutzt, so dass sich ein nicht-lineares Verhalten realisieren lässt. Thomas‘ Mitarbeiter Hongxi Zhu entwickelte die ersten Ideen dann schnell zu funktionierenden Prototypen weiter.
An der TU Chemnitz ist in den vergangenen fünf Jahren unter Leitung von Prof. Ulrike Thomas ein neues Robotik-Team entstanden, das zu humanoider Robotik intensiv forscht. Dabei entstehen neue mechatronische Systeme, für die auch moderne Methoden aus der KI-Forschung genutzt werden. Die Roboter sollen feinfühliger greifen oder stabiler laufen und sicherer mit der Umgebung interagieren können, um robotische Helfer zu erhalten, sei es für Pflegeeinrichtungen, für die Produktion oder für zu Hause.





{kind=link}