
Das Worcester Polytechnic Institute (WPI) entwickelt zurzeit einen Operationsroboter, der auch im starken Magnetfeld eines MRT-Scanners arbeiten kann. Piezoelektrische Antriebe spielen dabei eine wichtige Rolle.
Bei der Behandlung von Gehirntumoren standen Chirurgen bisher vor einem Dilemma: Sie konnten mittels Magnetresonanztomographie (MRT) hochauflösende Bilder vom Tumor machen – oder ihn mit präzisen chirurgischen Werkzeugen entfernen. Kombinieren ließ sich beides nicht.
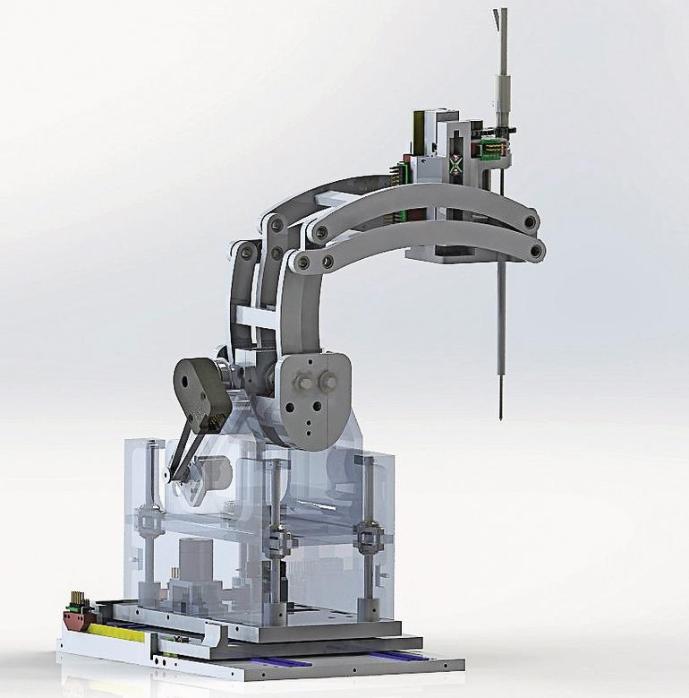
Das Worcester Polytechnic Institute (WPI) entwickelt jedoch jetzt einen Operationsroboter, der für den Einsatz innerhalb eines MRT-Geräts konzipiert ist. Er kann bildgeführt das chirurgische Werkzeug exakt an einer festgelegten Stelle des Tumors positionieren. Seine Entwicklung stellte das WPI-Team um Prof. Greg Fischer allerdings vor beachtliche Herausforderungen. In der Chirurgie müssen die Werkzeuge präzise, reproduzierbar und mit hoher Auflösung positioniert werden. Sie dürfen keine elektrischen Störgrößen produzieren, müssen sehr zuverlässig sein und – im Fall des MRT-Roboters – in mehreren Tesla starken Magnetfeldern funktionieren. Kombinationen aus elektromagnetischen Motoren und Getrieben kamen dafür nicht in Frage. Die Wahl fiel stattdessen auf ein piezobasiertes System – die einzige Art von Antrieben, die alle genannten Anforderungen erfüllen.
Solche Aktoren basieren auf einem piezoelektrischen Keramikmaterial, das sich bei Anlegen einer elektrischen Spannung ausdehnt. Allerdings nur in winzigen Dimensionen: Die durch den Piezoeffekt hervorgerufene Auslenkung beträgt nur den Bruchteil eines Prozents der Bauteilgröße. Beim MRT-Roboter war jedoch ein linearer Verfahrweg von bis zu etwa 100 mm erforderlich, und der Antrieb sollte auch eine kontinuierliche Drehung um 360 Grad ermöglichen. Die Lösung hierfür fand das WPI-Team in den Piezo-Legs-Motoren von Piezomotor, einem Unternehmen der Faulhaber-Gruppe. Diese wurden für präzise und energiesparend ausgeführte „Move-and-hold”-Anwendungen entwickelt.
Eine Aufgabe des Roboters ist es, ins Gewebe einzustechen. Dafür ist eine lineare Bewegung erforderlich, die das WPI-Team mit einer Kombination aus Piezolegs-Linearmotoren in einem Direktantrieb umsetzt. Als Antrieb sind Piezolegs-Drehmotoren im Einsatz. Die Drehbewegung wird dabei über Riemenscheiben übertragen, die im 3D-Druck erzeugt werden.
Für die Piezoantriebe ist es kein Problem, die entstehende Reibung zu überwinden. „Wir kommen mit einer niedrigen Untersetzung zurecht, unabhängig davon, ob wir einen Piezomotor in einem Direktantrieb oder mit einer Riemenscheibe einsetzen“, erklärt Fischer. Untersetzungsverhältnisse in der Größenordnung von 100:1, wie es bei einem kleinen DC-Motor erforderlich wäre, seien hier kein Thema.
Die piezoelektrischen Aktoren benötigen nur sehr kleine leitfähige Elektroden, die in der MRT-Umgebung nichtmagnetisch und eisenfrei sein müssen. Für diese Anwendung genügte das allerdings noch nicht. Denn alle elektrischen Störgrößen können das im MRT erzeugte Bild verfälschen. Objekte erscheinen dann nicht dort, wo man sie erwarten würde, und das ist laut Fischer „ein sehr großes Problem, wenn man versucht, sich bei einem Eingriff von der Bildgebung leiten zu lassen.”
Daher entwickelte das britische Team ein individuelles Steuerungspaket für den Betrieb von piezoelektrischen Motoren im MRT-Scanner. Es basiert auf einem feldprogrammierbaren Gate-Array (FPGA), schnellen Digital-Analog-Wandlern und breitbandigen Hochspannungs-Linearverstärkern. Externe Filter unterdrücken eventuelle Störungen, und eine Encoder-Rückführung ermöglicht eine Positions- oder Geschwindigkeitsregelung mit einem Single-Board-Mikrocontroller, auf dem eine Echtzeit-Regelungssoftware läuft.
Die modulare Backplane, die bis zu acht dieser Boards aufnehmen kann, ist in einem einzigen abgeschirmten Gehäuse untergebracht, das sich mit dem Roboter im MRT-Scanner-Raum befindet. Ein anwendungsspezifischer Kabelbaum verbindet Controller und Roboter, bei dem bis zu acht Achsen angesteuert werden können. Vereinfacht wurde dieses komplexe Projekt dadurch, dass die linearen und rotatorischen Piezomotoren als Stand-alone-Komponente sofort erhältlich waren.
Für die Zukunft hat das WPI-Team einiges vor: Fischer will eine Toolbox schaffen, mit der sich MRT-kompatible Roboter entwickeln lassen, die mit Sensoren, Aktoren, Controllern und Verstärkern ausgestattet sind und über Kommunikationsprotokolle gesteuert werden können. „In der Industrie braucht man nur eine im Handel erhältliche SPS, einen Motor oder einen Encoder zu kombinieren, und schon hat man ein funktionsfähiges System”, meint Fischer. „So etwas gibt es für medizintechnische Geräte nicht – erst recht nicht für MRT-Anwendungen.”
Zum MRT-Roboter gibt es aber sogar schon Varianten, zum Beispiel für die Präzisions-Thermoablation bei Gehirntumoren, die Positionierung von Elektroden für die tiefe Hirnstimulation, mit der die Parkinsonkrankheit behandelt wird, oder die gezielte, MRT-geführte Biopsie bei Prostatakrebs. „Wir streben sehr kompakte und anwendungsspezifische Lösungen an”, sagt Fischer. „Sie alle basieren auf den gleichen Motoren, die sich für uns als sehr effektiv erwiesen.
Andreas Seegen Dr. Fritz Faulhaber, Schönaich
Funktion der Piezo-Legs-Motoren

Durch die Funktionsweise der Piezo-Legs-Motoren ist der Stellweg, den sie ermöglichen, theoretisch unbegrenzt. Aufgebaut sind die Motoren aus piezoelektrischen Biegewandlern. Wird eine Spannung angelegt, reagieren sie unsymmetrisch, eine Seite dehnt sich aus, die andere zieht sich zusammen, was in einer Biegung resultiert.
Werden diese Elemente als abwechselnde Paare angeordnet und entsprechend angesteuert, können sie eine Antriebsstange in Nanometerschritten mit Geschwindigkeiten von bis zu 15 mm/s bewegen, also diese quasi immer weiter „durchreichen“.
Bei Rotationsbewegungen wird auf die gleiche Weise eine Scheibe in eine entsprechend schnelle Drehung versetzt. Dabei sind die Aktoren selbsthemmend, verbrauchen im ausgeschalteten Zustand keine Energie, erwärmen sich nicht und halten die Position mechanisch stabil.
Ihr Stichwort
- Piezo-Antriebe
- Lineare- und Drehbewegungen
- Einsatz im Magnetfeld des MRT
- Tumoroperationen, tiefe Hirnstimulation, Biopsien
Teilen:





{kind=link}